13.3 Controlling Operation from the Host Controller
13.3.5 Hard Stop Operation
13-20
13.3.5
Hard Stop Operation
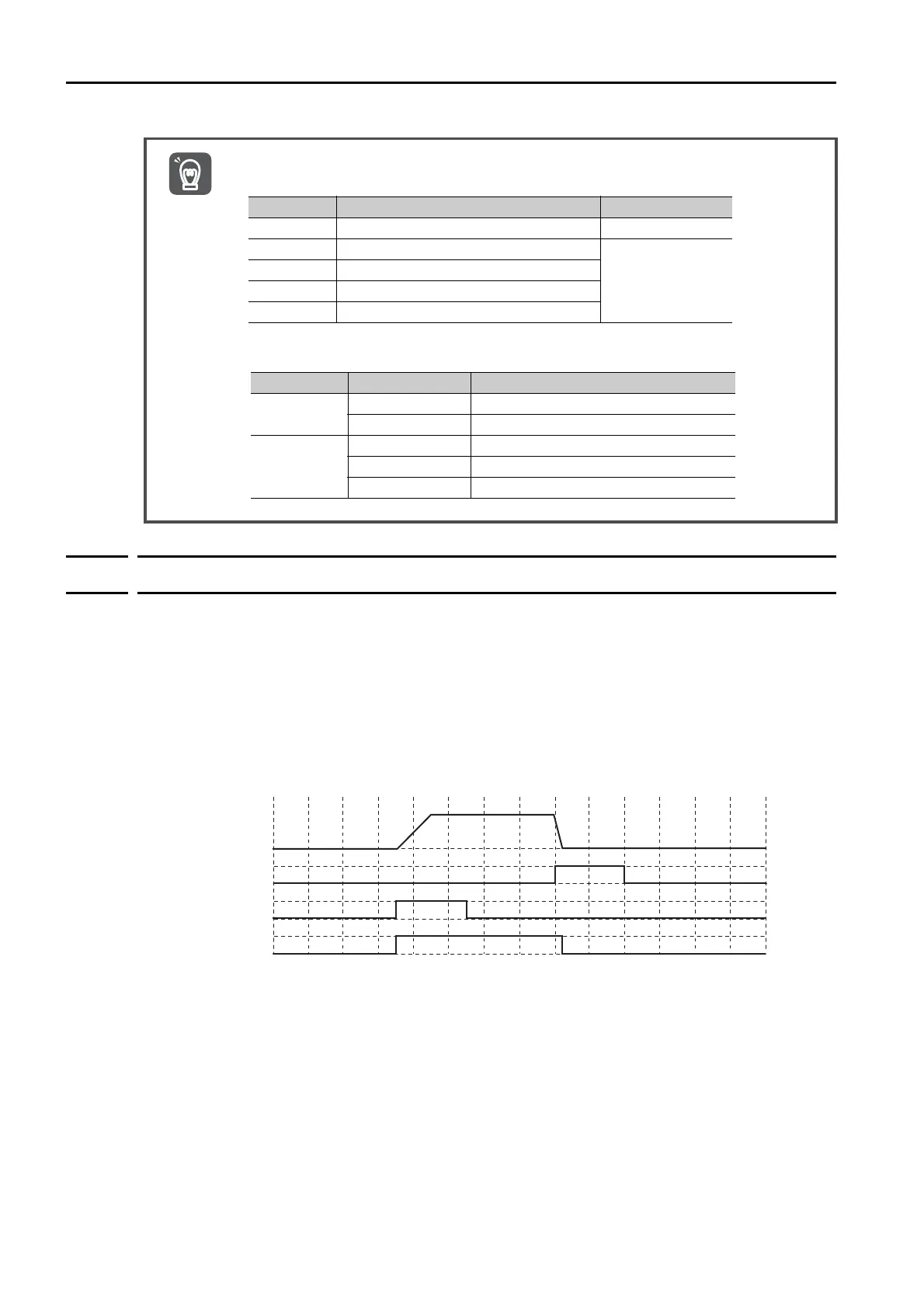
To execute a Hard Stop command, the maximum deceleration is used to stop the Servomotor.
1.
If the Hard Stop bit is set to 1 while the Servomotor is moving, the Servomotor will
decelerate to a stop using the maximum deceleration rate.
2.
After the motor stops, the target position is set to the current position, and the On Target
Position bit is set to 1.
3.
The hard stop status can be cleared by clearing the Hard Stop bit to 0. Execution of the
Hard Stop command will continue even if the Hard Stop bit is cleared to 0 during com-
mand execution (i.e., during deceleration).
• Setting the Parameters
Make sure that the following parameters are set to the correct values.
• Using an Explicit Message
Make sure that the following attributes are set to the correct values.
Important
Pn Parameter Name Value
PnB12 Coordinate Type Selection 0001h
PnB13 Reference Units per Machine Revolution
Depends on the
system.
PnB54 Positioning Approach Speed
PnB55 End Position
PnB59 Approach Mode
Object Attribute Attribute Name
0x25
200 Approach speed for positioning
201 End position
0x64
32 Coordinate Type
33 Command value per machine rotation
99 Approach Mode
A1
Hard Stop
Motor speed
Hard stop
Start Trajectory
Trajectory In
Progress
1
0
1
0
1
0
V1
 Loading...
Loading...




