13.3 Controlling Operation from the Host Controller
13.3.4 Switching to Positioning
13
DeviceNet Communications
13-19
After rotating the motor for the required time, send the following command message.
PnBA5 Bit 15 = 0 (Positioning Command)
A Positioning command (command assembly code = 0x01) is used.
PnBA5 Bit 15 = 1 (Switch to Positioning Command)
The Switch to Positioning command (command assembly code = 0x1F) is used.
6 0x00 Target Speed High Middle Byte
7 0x00 Target Speed High Byte
Bytes Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
Enable
1
Valid
Data
0
Hard
Stop
0
Smooth
Stop
0
Direction
(V mode)
0
Absolute/
Incremen-
tal
0
Start
Block
1
Start
Trajectory
1 0x00 Block Number
2 0x1 Axis Instance 0x01 Command Assembly Code
3 0x1 Axis Instance 0x03 Response Assembly Code
4 0x00 Target Position Low Byte
5 0xF4 Target Position Low Middle Byte
6 0x01 Target Position High Middle Byte
7 0x00 Target Position High Byte
Bytes Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
Enable
1
Valid
Data
0
Hard
Stop
0
Smooth
Stop
0
Direction
(V mode)
0
Absolute/
Incremen-
tal
0
Start
Block
1
Start
Trajectory
1 0x00 Block Number
2 0x1 Axis Instance 0x1F Command Assembly Code
3 0x1 Axis Instance 0x03 Response Assembly Code
4 0x00
5 0x00
6 0x00
7 0x00
Bytes Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
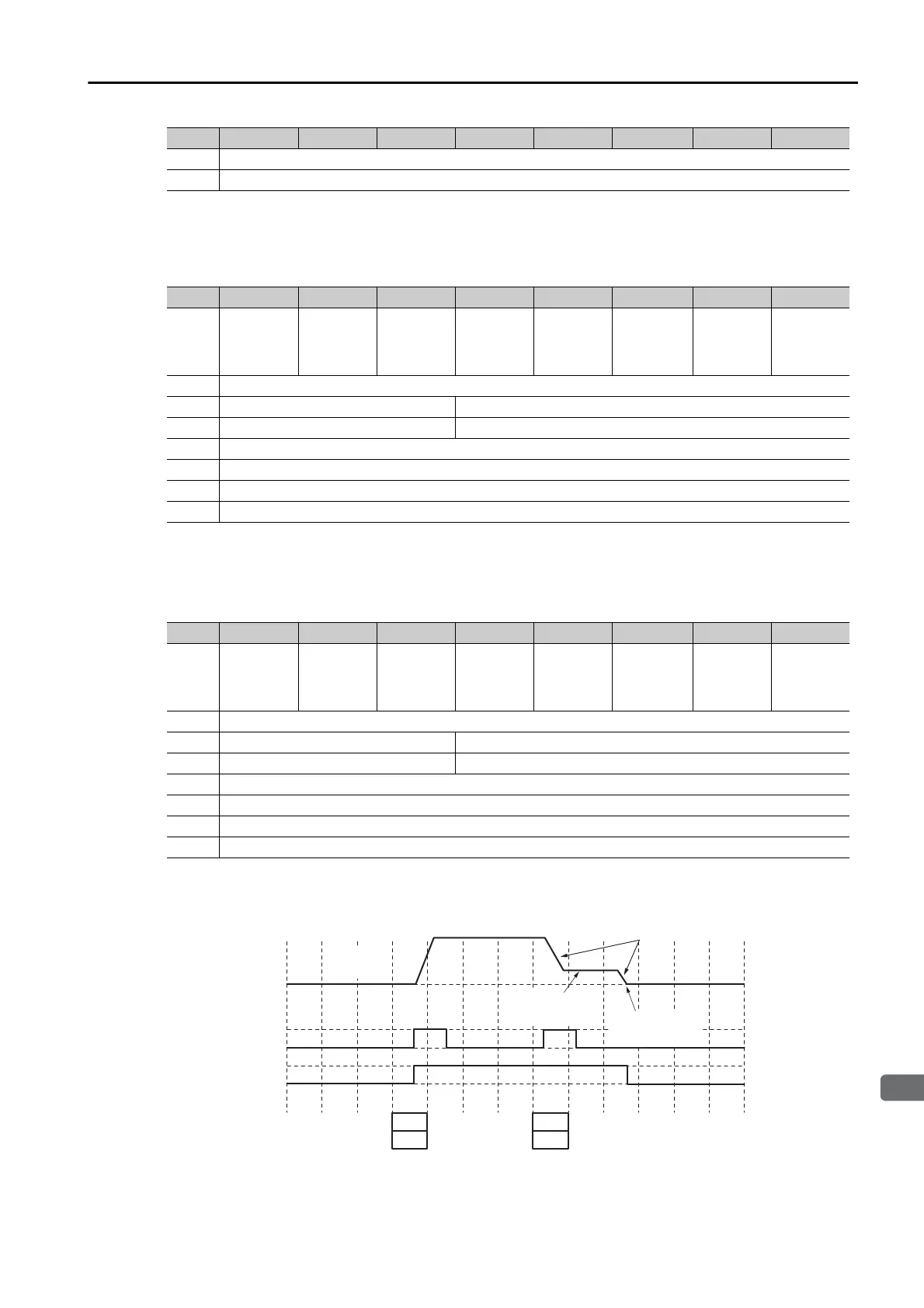
Motor speed
Command Data
Acceleration rate
(PnB2A)
Continuous motor speed
(V1)
Deceleration rate (PnB2B)
Start Trajectory
Trajectory In
Progress
0
1
0
0x11
V1
0x1F
0x00
1
Positioning approach speed
(PnB54)
End position
(PnB55)
Example: Using the Switch to Positioning Command
 Loading...
Loading...




