12.4 Positioning after Continuous Operation
12.4.2 Parameter Settings
12-14
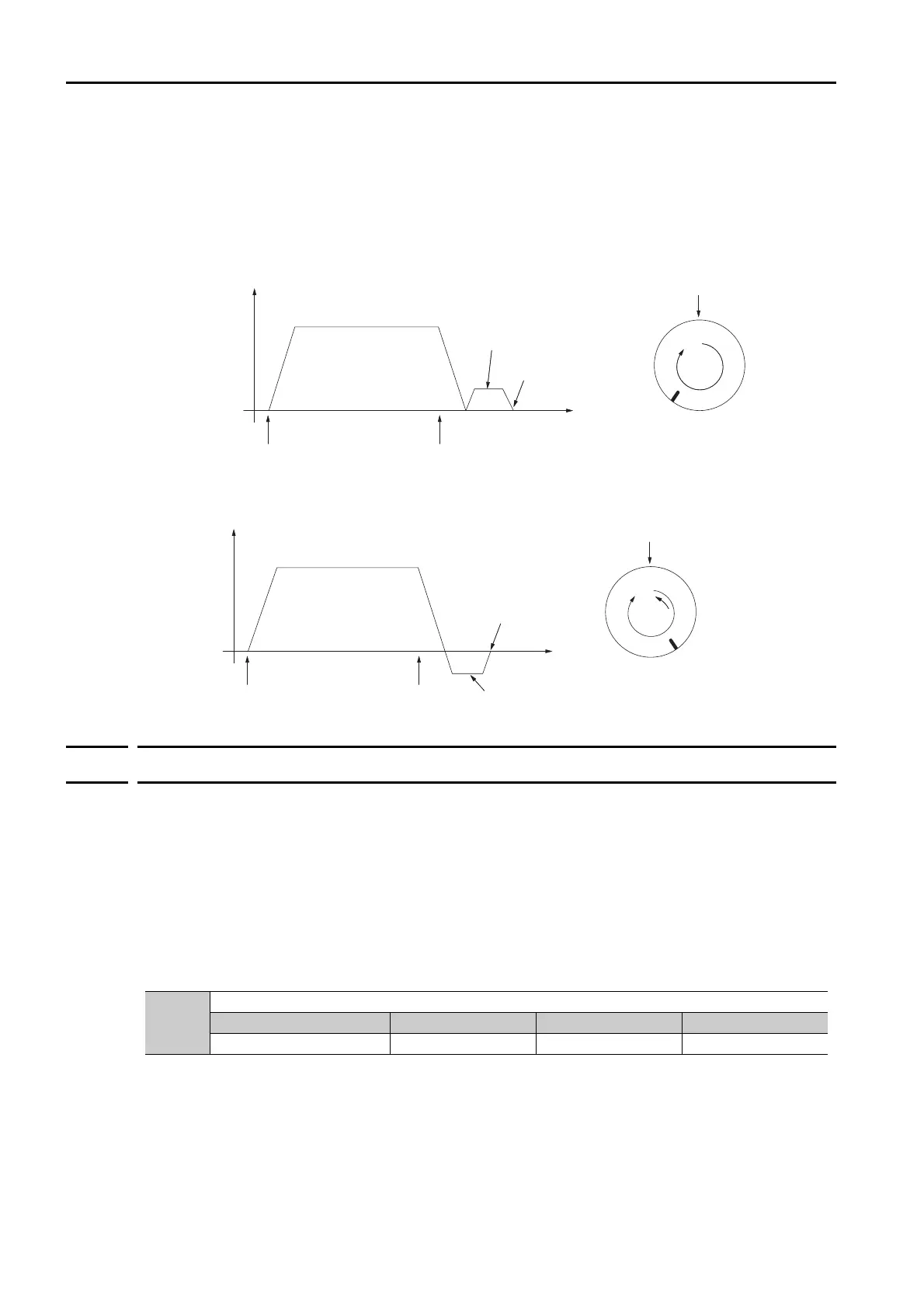
Positioning by the Near Course
For positioning by the near course, the Servomotor rotates in the direction that was specified
for continuous operation until a switching command is received. After a switching command is
received, the Servomotor decelerates to a stop. Then the SERVOPACK positions the Servomo-
tor to the end position in the nearest direction.
Positioning in the Specified Rotation Direction
Positioning in the Reverse Direction
12.4.2
Parameter Settings
Setting the Coordinate System
To perform positioning after continuous operation, the Coordinate Type Selection and Refer-
ence Units per Machine Revolution parameters must be set correctly.
Approach Speed
If PnB59 (Approach Mode) is set to 1 or 2, the approach speed must be set to perform posi-
tioning after continuous operation. The approach speed is the positioning speed that is used to
position to the end position after stopping continuous operation.
Speed
Continuous motor speed
Continuous operation command
Switching command
Time
End position
Approach speed
End position
Speed
Continuous motor speed
Continuous operation command
Switching command
Time
End position
Approach speed
End position
PnB54
Positioning Approach Speed
Setting Range Setting Unit Default Setting When Enabled
1 to 115,343,500 1 reference unit/s 400,000 Immediately
 Loading...
Loading...




