13.3 Controlling Operation from the Host Controller
13.3.3 Origin Returns
13
DeviceNet Communications
13-15
13.3.3
Origin Returns
The origin return operation returns the current position to the machine origin. Three types of
origin returns are supported.
• Type 0: Operation Based on Home Flag and Encoder Phase C Detection
• Type 1: Operation Based on Only the Home Flag
• Type 3: Operation Based on Only Encoder Phase C Detection
Typ e 0
Origin returns are based on the Home Flag and the detection of phase C of the encoder.
1.
The axis travels at the origin approach speed in the specified origin return direction.
2.
When the status of the Home Flag changes, the axis will change the direction. The axis
will then travel at the origin return creep speed until the status of the Home Flag
changes again.
Bytes Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
Enable
1
Valid
Data
0
Hard
Stop
0
Smooth
Stop
1
Direction
(V mode)
0
Absolute/
Incremen-
tal
0
Start
Block
1
Start
Trajectory
1 0x00 Block Number
2 0x1 Axis Instance 0x11 Command Assembly Code
3 0x1 Axis Instance 0x03 Response Assembly Code
4 0x40 Target Velocity Low Byte
5 0x1F Target Velocity Low Middle Byte
6 0x00 Target Velocity High Middle Byte
7 0x00 Target Velocity High Byte
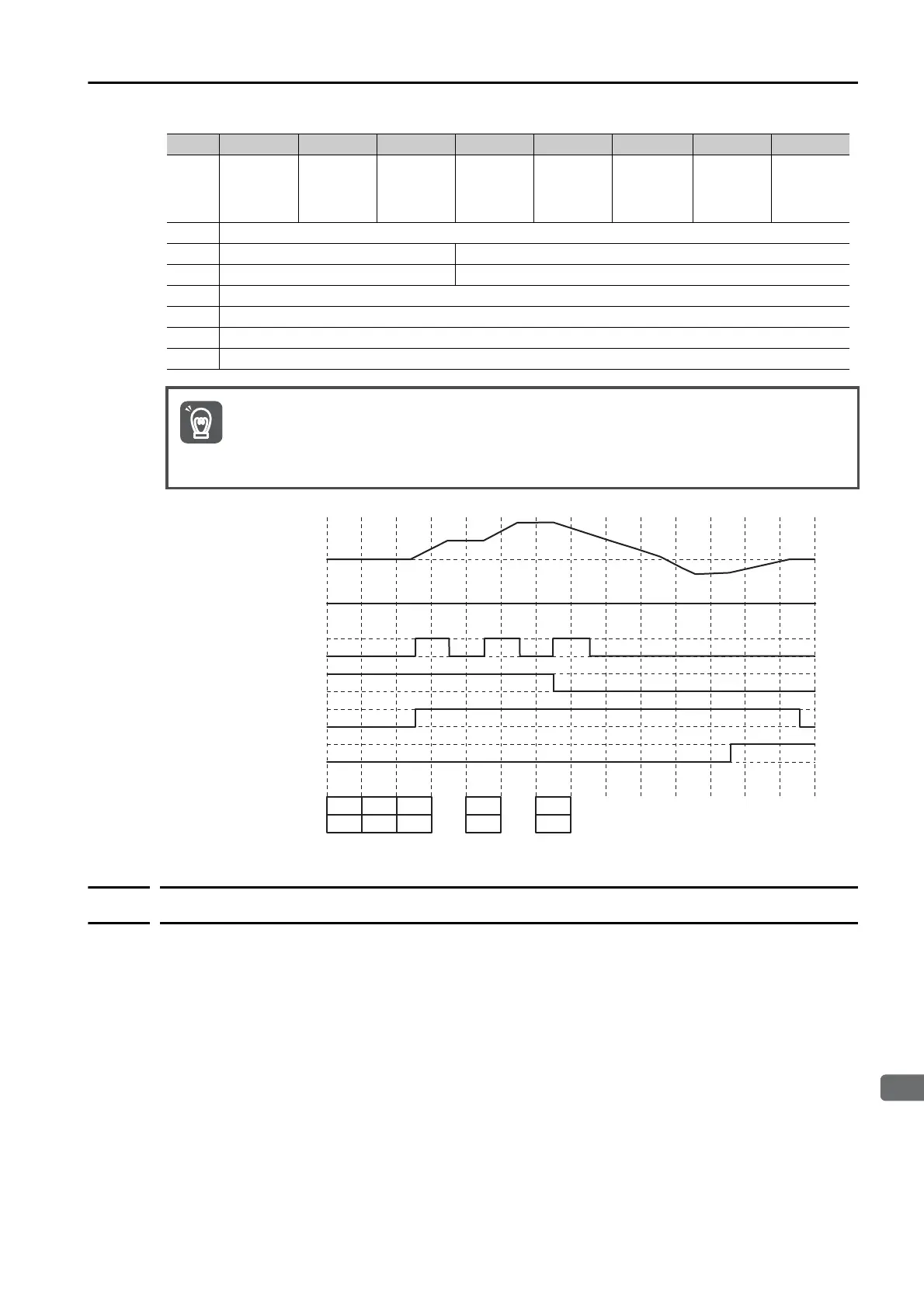
• If an alarm occurs, the servo is OFF, or another operation command, such as positioning or an
origin return, is being executed, the continuous operation command will be ignored.
• Make sure that the Enable State bit in the response message is set to 1, and then set the Start
Trajectory bit. If you set the Enable bit and the Start Trajectory bit at the same time, the Start
Trajectory bit will be ignored.
Motor speed
Enable
1
0
1
0
1
0
1
0
1
0
Command Assembly Code
Command Data
Start Trajectory
Direction
Smooth Stop
Trajectory In
Progress
03h
A1
04h
D1
11h
V1
11h
V2
11h
V3
A1
A1
V1
V2
D1
A1
V3
D1
 Loading...
Loading...




