13.2 Communications Methods
13.2.1 I/O Communications
13-5
13
DeviceNet Communications
13.2
Communications Methods
The DeviceNet Module supports two types of communications: I/O communications and
explicit message communications.
13.2.1
I/O Communications
This section describes the command messages that are sent from the master device to the
SERVOPACK and the response messages that are returned by the SERVOPACK. These are
required for I/O communications.
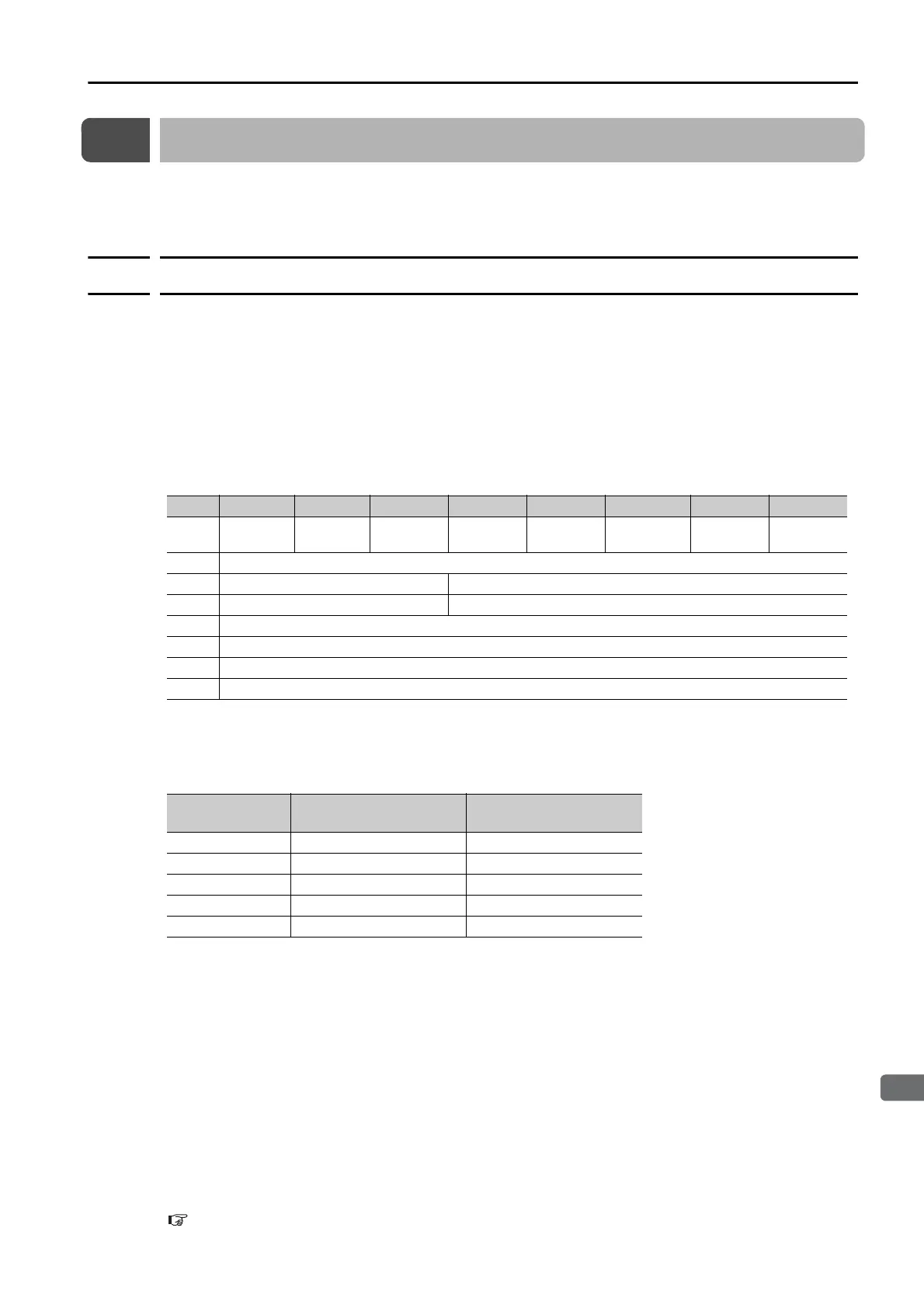
Command Format
The following table gives the data format of the command messages sent to the SERVOPACK
from the master device. Command messages consist of 8 bytes. Bytes 0 to 3 have the same
format for all commands. Byte 0 contains command bits. Bytes 4 to 7 store data that depends
on the command assembly code in byte 2.
Start Trajectory
Use the Start Trajectory bit to start a move operation. A move operation starts when this bit
changes from 0 to 1 for any of the following command assembly codes.
* The value of PnB55 is the end position.
The SERVOPACK detects when this bit is set to 1. The operation will continue even if it is
cleared to 0 during axis travel.
To stop the move operation before it is completed, set the Smooth Stop bit or the Hard Stop bit
to 1.
Start Block
Use the Start Block bit to start the execution of command blocks stored in the SERVOPACK.
You can change this bit from 0 to 1 to execute the commands in the command blocks that
have been registered in advance. If this bit is cleared from 1 to 0 during execution of the com-
mand blocks, execution of the command blocks will be stopped.
Refer to the following section for details on the command blocks.
13.4.2 Command Blocks on page 13-23
Bytes Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Enable
Valid
Data
Hard
Stop
Smooth
Stop
Direction
(V mode)
Absolute/
Incremental
Start
Block
Start
Trajectory
1 Block Number
2 Axis Instance Command Assembly Code
3 Axis Instance Response Assembly Code
4 Data Low Byte
5 Data Low Middle Byte
6 Data High Middle Byte
7 Data High Byte
Command
Assembly Code
Command Data Operation
0x01 Target position Positioning
0x11 Continuous motor speed Continuous operation
0x12 Origin return type Origin return
0x1E Alarm clear Alarm clear
0x1F (Switch to positioning)* Switch to positioning
 Loading...
Loading...




