12.4 Positioning after Continuous Operation
12.4.1 Positioning Patterns after Continuous Operation
12-13
12.4
Positioning after Continuous Operation
12.4.1
Positioning Patterns after Continuous Operation
When the SERVOPACK receives a command to switch to positioning during continuous opera-
tion, the following three types of positioning can be performed depending on the parameter
settings. These positioning patterns can be used when a rotary coordinate system is specified.
• Direct positioning
• Positioning in specified rotation direction
• Positioning by the near course
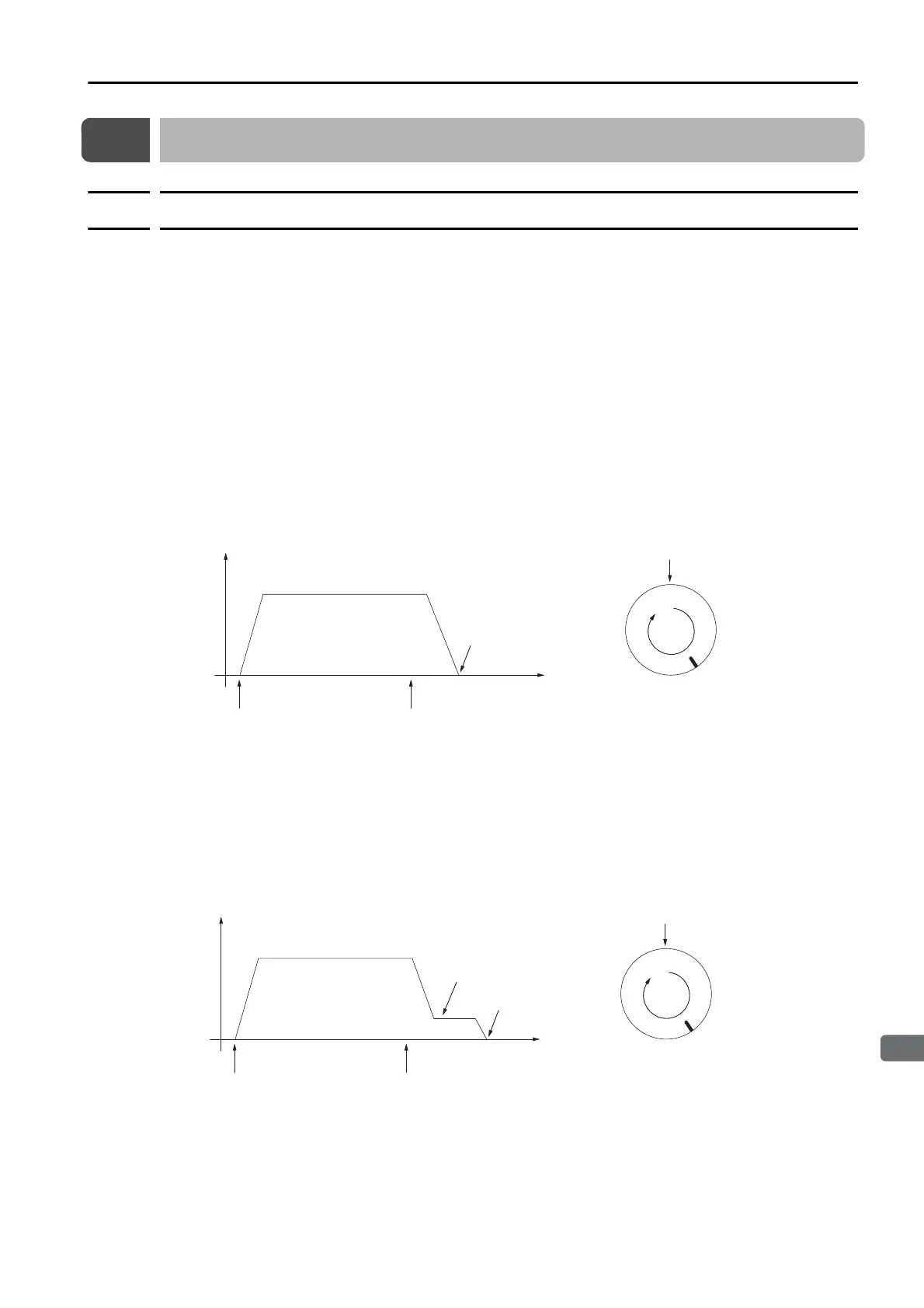
Direct Positioning
For direct positioning, the Servomotor rotates in the direction that was specified for continuous
operation until a switching command is received. After receiving the switching command, the
Servomotor starts positioning and moves to the end position. In this mode, the Servomotor
rotates only in the direction that was specified for continuous operation. Also, the approach
speed is not used and positioning is performed at the high speed.
Positioning in Specified Rotation Direction
For positioning in the specified rotation direction, the Servomotor rotates in the direction that
was specified for continuous operation until a switching command is received. After receiving a
switching command, the Servomotor decelerates to the approach speed and stops at the end
position. In this mode, the Servomotor rotates only in the direction that was specified for con-
tinuous operation.
Speed
Continuous motor speed
Continuous operation command
Switching command
Time
End position
End position
Speed
Continuous motor speed
Continuous operation command
Switching command
Time
End position
Approach speed
End position
 Loading...
Loading...




