16.3 DeviceNet Attributes
16.3.7 Position Controller Object
16-12
16.3.7
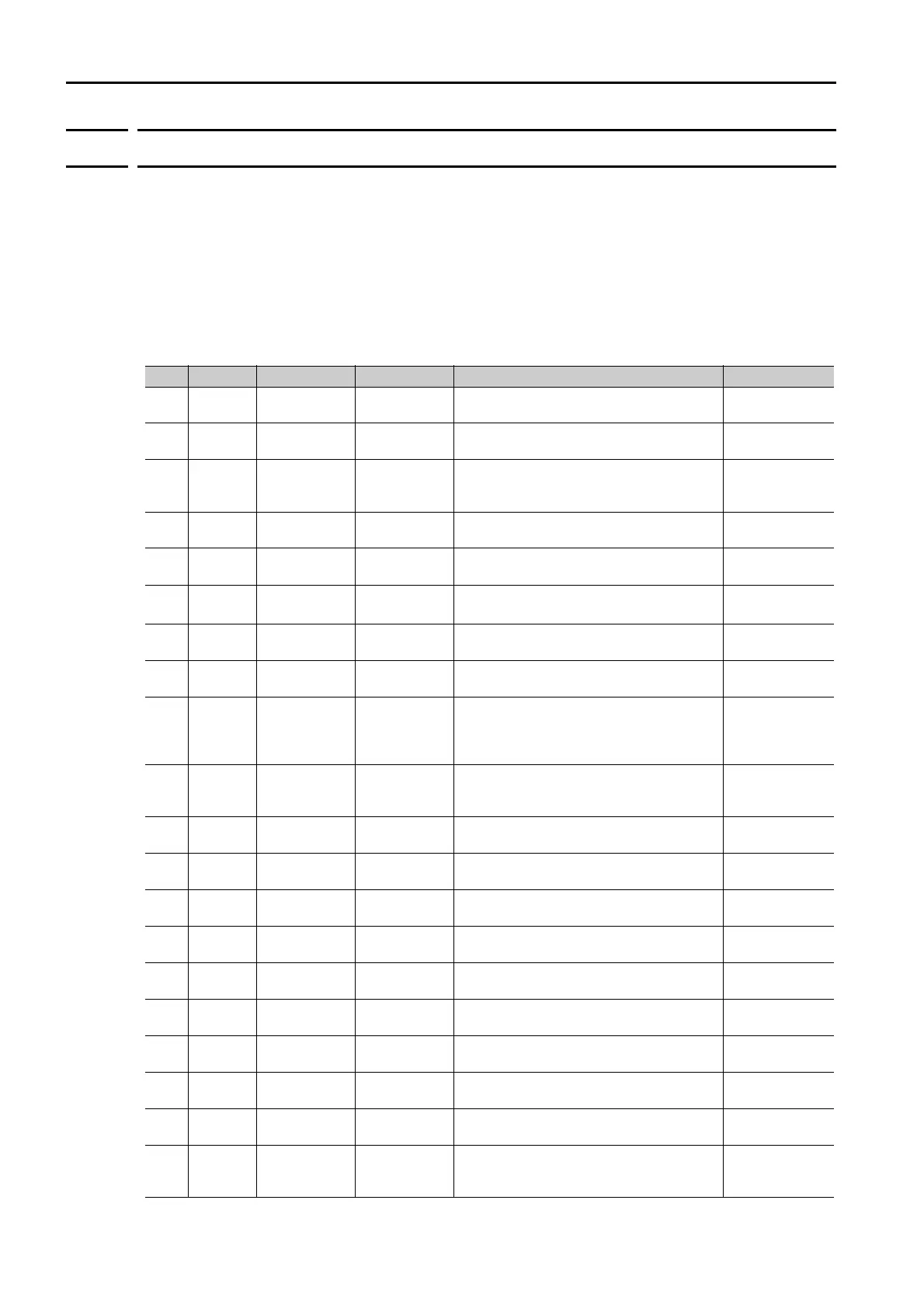
Position Controller Object
Class: 0x25
Attributes: Not supported.
Services: Not supported.
Instance 1
Attributes
No. Access Name Data Type Description Value
1Get
Number of
Attributes
USINT
Gives the number of attributes contained
in this object.
–
2GetAttribute List
Array of
USINT
Gives the arrangement of the attribute
numbers that are contained in this object.
–
3Get/SetMode USINT Specifies the operating mode.
0: Positioning
1: Continuous
operation
6Get/Set
Target Posi-
tion
DINT
Specifies the target position.
Unit: Reference units
0x80000001 to
0x7FFFFFFF
7Get/Set
Target Veloc-
ity
DINT
Specifies the target rate.
Unit: Reference units/s
1 to
115,343,500
8Get/SetAcceleration DINT
Specifies the acceleration rate.
Unit: Reference units/s
2
15,625 to
2,047,968,750
9Get/SetDeceleration DINT
Specifies the deceleration rate.
Unit: Reference units/s2
15,625 to
2,047,968,750
10 Get/Set
Incremental
Position
BOOL
Specifies either absolute or incremental
positioning.
0: Absolute
1: Incremental
11 Get/Set
Trajectory
Start/Com-
plete
BOOL Starts operation.
1: Start opera-
tion.
0: Operation
completed.
12 Get
On Target
Position
BOOL
Indicates whether the current position is
within the positioning completed width.
1: Within posi-
tioning com-
pleted width.
13 Get/Set
Actual Posi-
tion
DINT
Gives the current position.
Unit: Reference units
0x80000001 to
0x7FFFFFFF
14 Get
Actual
Velocity
DINT
Gives the current speed.
Unit: Reference units/s
0 to
115,343,500
15 Get
Commanded
Position
DINT
Gives the reference position.
Unit: Reference units
0x80000001 to
0x7FFFFFFF
16 Get
Commanded
Velocity
DINT
Gives the command speed.
Unit: Reference units/s
0 to
115,343,500
17 Get/Set Enable BOOL Specifies a Servo ON command.
0: Servo OFF
1: Servo ON
18 Get/Set Profile Type USINT
Specifies the acceleration/deceleration
type.
–
19 Get/Set Profile Gain DINT
Specifies the time constant for S-curve
acceleration/deceleration.
4 to 4,000
20 Get/Set Smooth Stop BOOL
Specifies the command to decelerate to
a stop.
1: Smooth Stop
command
21 Get/Set Hard Stop BOOL Specifies the Hard Stop command.
1: Hard Stop
command
22 Get/Set Jog Velocity DINT
Specifies the speed for continuous oper-
ation.
Unit: Reference units/s
1 to
115,343,500
Continued on next page.
 Loading...
Loading...




