8.12 Additional Adjustment Functions
8.12.3 Gravity Compensation
8-71
8.12.3
Gravity Compensation
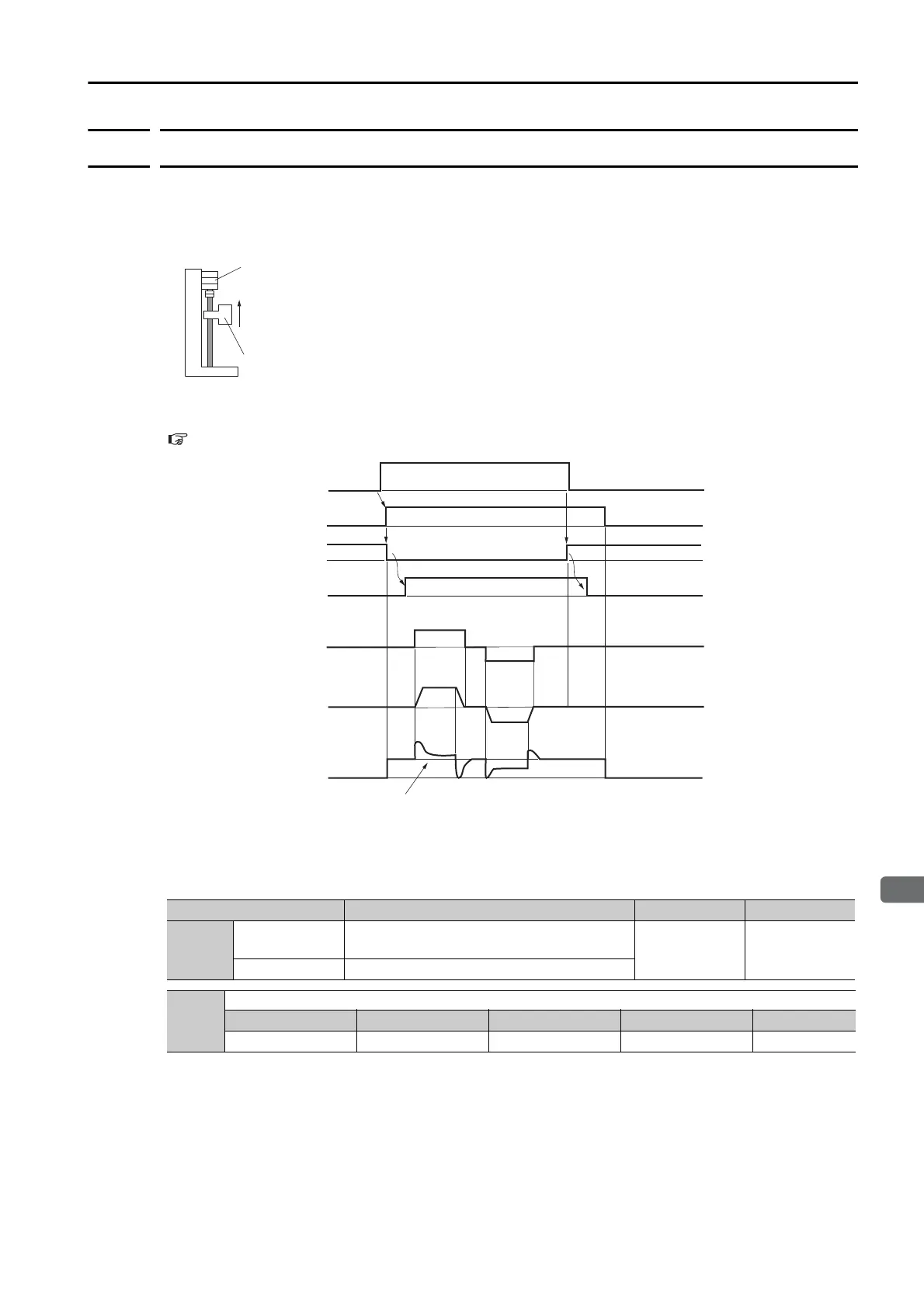
When the Servomotor is used with a vertical axis, gravity compensation prevents the moving
part from falling due to the machine’s own weight when the brake is released.
SERVOPACKs with software version 0023 or higher support gravity compensation.
A timing chart for when the moving part is raised then lowered is provided below.
Refer to the following section for details on brake operation timing.
5.11.1
Brake Operating Sequence
on page 5-30
Required Parameter Settings
The following parameter settings are required to use gravity compensation.
Parameter Description When Enabled Classification
Pn475
n.0
(default setting)
Disable gravity compensation.
After restart Setup
n.1 Enable gravity compensation.
Pn476
Gravity Compensation Torque
Setting Range Setting Unit Default Setting When Enabled Classification
-1,000 to 1,000 0.1% 0 Immediately Tuning
Holding brake
When the brake is released, the gravity
compensation torque prevents the
moving part from moving due to gravity.
Moving part of machine
Servomotor
0
0
0
Servo OFF command (Enable)
Torque reference
Gravity compensation torque (Pn476)
0
(servo OFF)
OFF
Brake
applied.
1
(servo ON)
Power supplied.
ON
Brake released.
0
(servo OFF)
Power not supplied.
OFF
Brake applied.
Power not
supplied.
Motor power status
/BK (Brake) signal
Brake contact section
(lining)
Position/speed reference
Motor speed
 Loading...
Loading...




