7.4 Trial Operation with DeviceNet Communications
7-10
7.4
Trial Operation with DeviceNet Communications
A trial operation example for DeviceNet communications is given below.
Refer to the following chapter for details on commands.
Chapter 12 DeviceNet Functions
1.
Connect the DeviceNet communications connector (CN6 connector).
2.
Confirm that the wiring is correct, and then connect the I/O signal connector (CN1 con-
nector).
Refer to the following chapter for details on wiring.
Chapter 4 Wiring and Connections
3.
Turn ON the power supplies to the SERVOPACK.
If power is being supplied correctly, the CHARGE indicator on the SERVOPACK will light.
4.
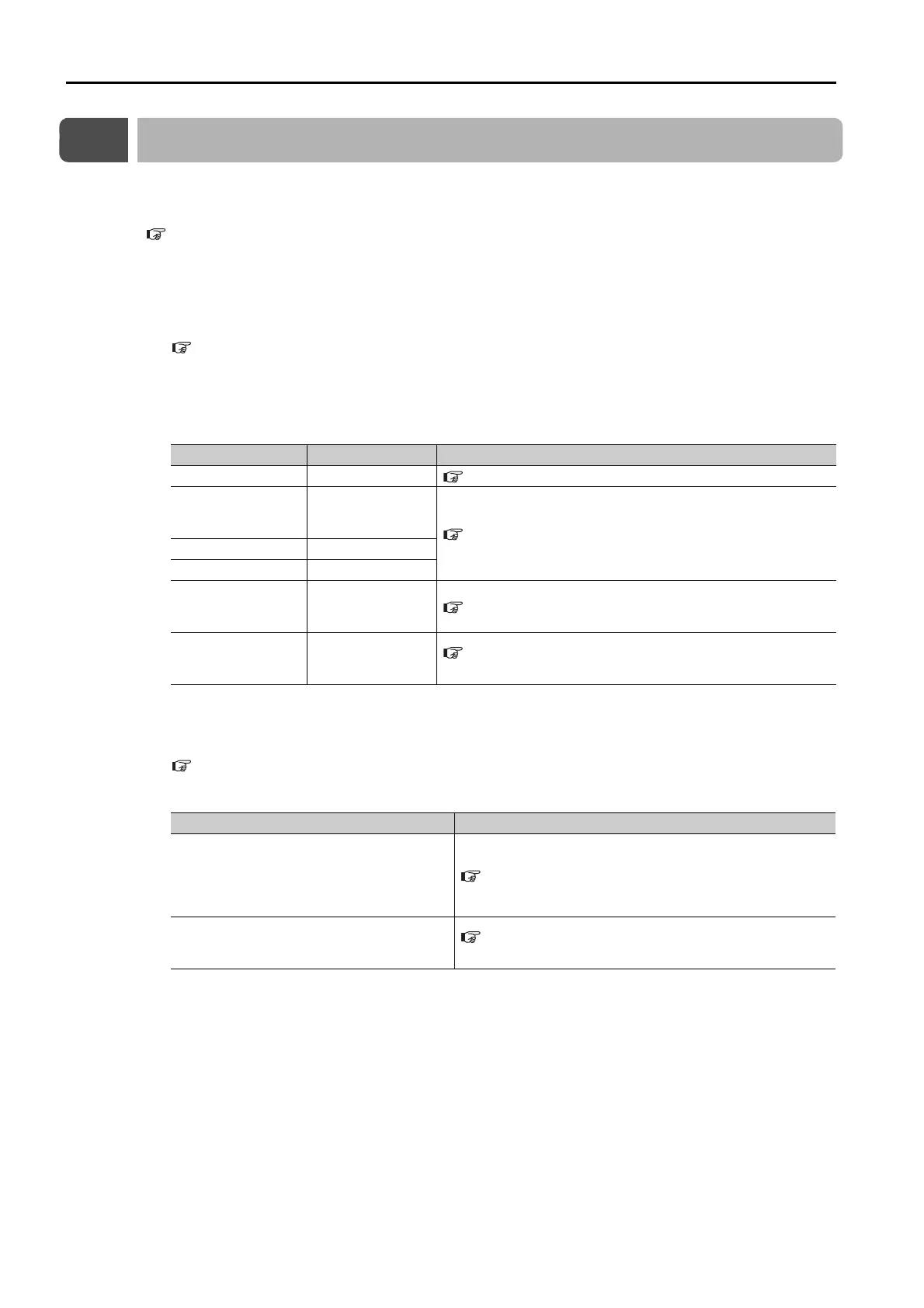
Set the following items, which are necessary for trial operation.
* Set Pn507 for a Rotary Servomotor and Pn583 for a Linear Servomotor.
5.
Use DeviceNet I/O communications to perform positioning.
Refer to the following section for details on operation.
12.3 Positioning on page 12-6
6.
While operation is in progress for step 5, confirm the following items.
Note: If the load machine is not sufficiently broken in before trial operation, the Servomotor may become over-
loaded.
Setting Parameters to Set Reference
Motor Direction Pn000
5.4 Motor Direction Setting on page 5-16
Feed Speed
PnB21
PnB26
PnB29
12.3 Positioning on page 12-6
Acceleration Rate PnB2A
Deceleration Rate PnB2B
Holding Brake
Pn506
Pn507 (Pn583)*
Pn508
5.11 Holding Brake on page 5-30
Motor Stopping
Method after Servo
OFF and Alarms
Pn001
Pn00B
5.12 Motor Stopping Method for Servo OFF and Alarms on
page 5-34
Confirmation Item Reference
Confirm that the rotational direction of the
Servomotor agrees with the forward or
reverse reference. If they do not agree, cor-
rect the rotation direction of the Servomo-
tor.
5.4 Motor Direction Setting on page 5-16
Confirm that no abnormal vibration, noise,
or temperature rise occurs. If any abnor-
malities are found, implement corrections.
14.4 Troubleshooting Based on the Operation and Condi-
tions of the Servomotor on page 14-56
 Loading...
Loading...




