4.3.2.3 Load Compensation
Parameter Possible Values Default Rev HHP Lite Std Adv
Load Compensation 0 – 500 mΩ 0 mΩ -,A
Load Compensation automatically compensates for changes in motor speed when
the chair drives over loads such as sidewalks, curbs or slopes. Correct Load
Compensation is important for all chairs to reach acceptable performance,
especially when a chair has switched controls, for example a scanner or Sip and Puff.
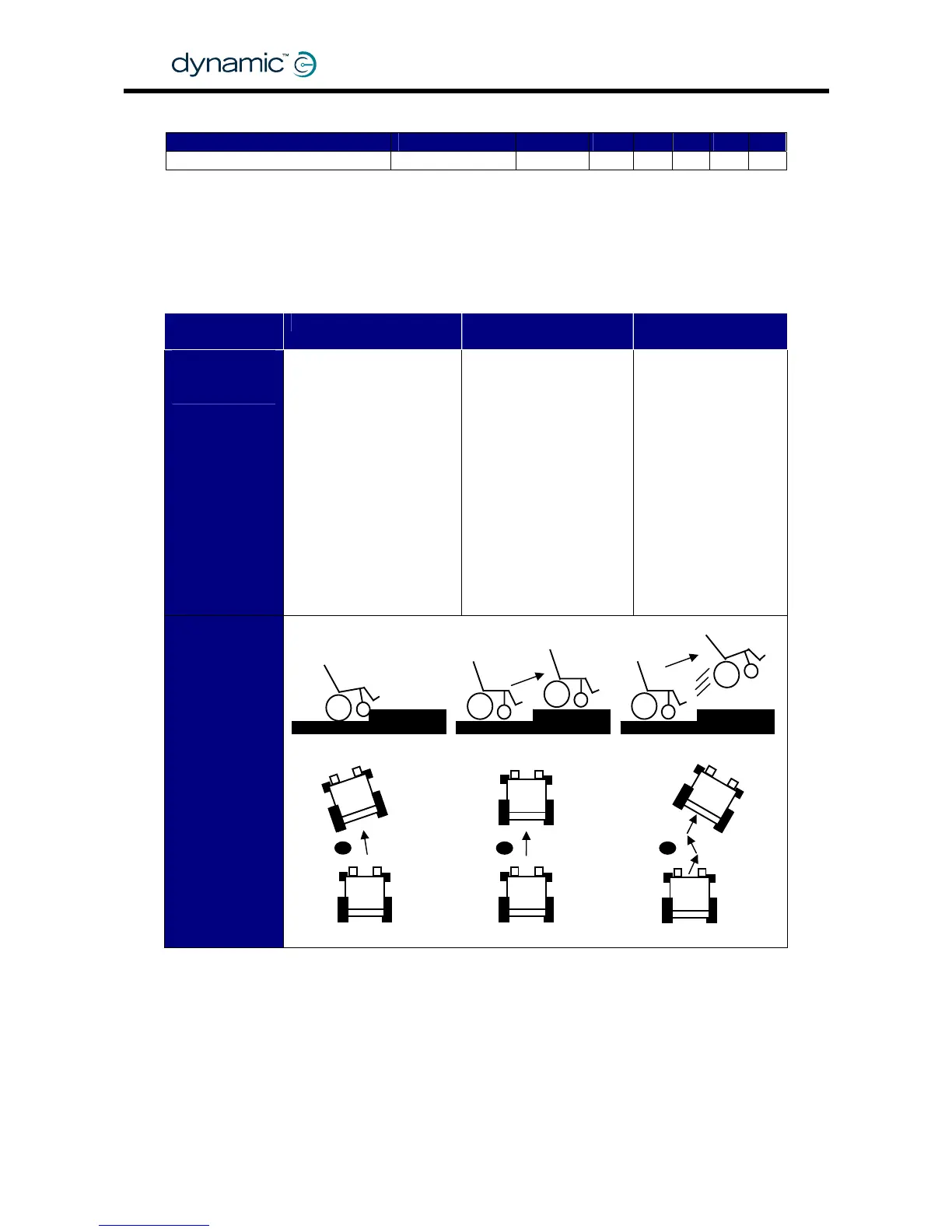
Load
compensation
Too low Correct Too high
Chair
behaviour
• Drives like it is going
through thick mud
• Slows down when it
goes up a sidewalk
edge or up a ramp
• Slows down with
heavier users
• Changes direction
when it drives over a
bump
• Changes direction
when the weight of
the user shifts.
• Drives smoothly
• Keeps the speed
reasonably
constant. Only
slightly slows down
on a slope.
• Keeps the
direction constant.
Only slightly
changes direction
when it drives over
a bump.
• Drives very
rough
• Hard to steer or
control, vibrates
• Swerves when it
drives over a
bump.
• Motor becomes
hotter than
normal very
easily,
decreased
motor life
GBK60348
: Issue 1 – October 2007
34
Aaagh!
Hnnng!
Set Load Compensation to the correct motor resistance value of the used motor (for
motor resistance see section
2.3.3).