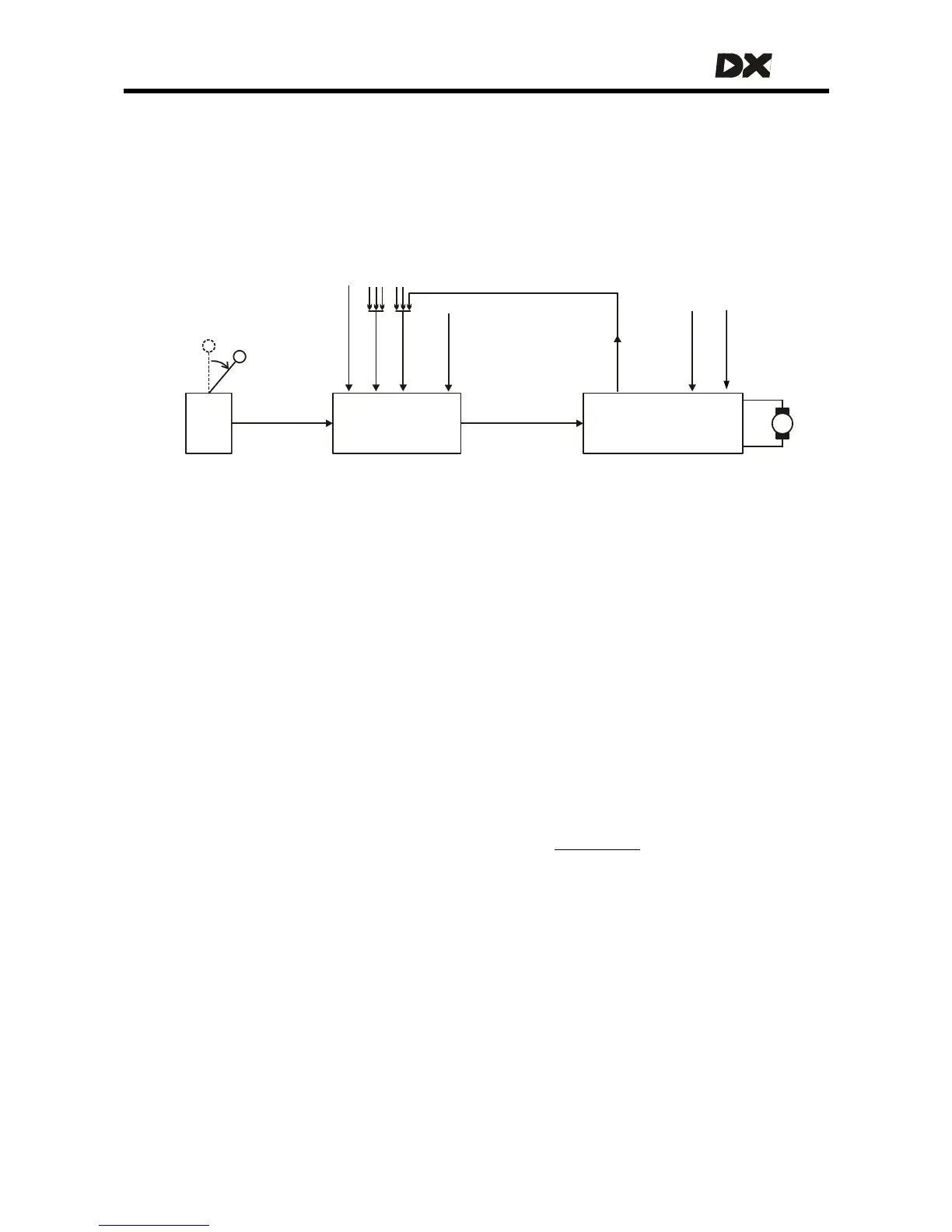
Accel/Decel
Speed Demand
0 – 100 %
Joystick
deflection
0-100 %
Power
Module
UCM
Speed Limiting Options
Input Demand Scaler
Max Demand
Spd Limit
Speed Pot
Speed @ Max
5.3.1.1 Speed Demand
When the user deflects the joystick or presses a drive control switch, the UCM (see
section
5.1.1) converts the Joystick Deflection value into a Speed Demand value. The
UCM then sends this Speed Demand value to the Power Module. The Speed Demand
value is given as a percentage of the mechanical top speed of the powerchair.
The actual achievable mechanical top speed (in km/h) of any particular powerchair
depends on factors like
• the wheel size
• the motors
• the gear used
• the available battery voltage
(batteries that are almost empty have a lower maximum output voltage).
The mechanically achievable top speed varies greatly between powerchair models.
For this reason the Speed Demand value is given as a
percentage of that
mechanical top speed.
For example:
• A chair that has a mechanical top speed of 12 km/h will drive at
approximately 6 km/h when the Speed Demand is 50%*.
• A chair that has a mechanical top speed of 8 km/h will drive at approximately
6 km/h when the Speed Demand is 75%*.
*When the Input Demand Scaler and the Maximum Motor Volts parameters are both set at their maximum
value. See next section for more details.
53