MT
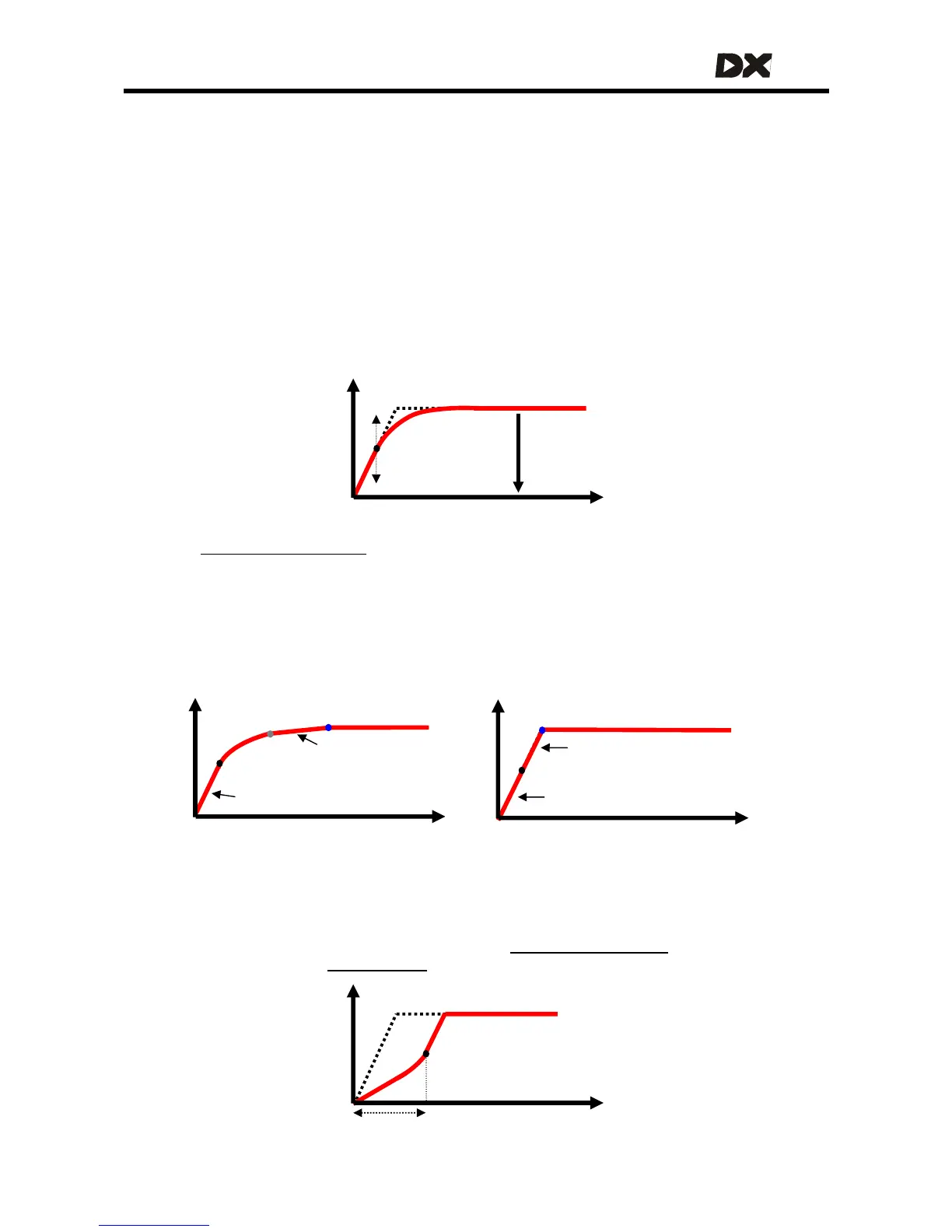
Damping Point
When the powerchair almost reaches the desired speed, the
acceleration / deceleration rate (that initially is given by the applicable
acceleration / deceleration parameter of the previous page) is slowly decreased to
zero. This prevents a sudden change in acceleration once the desired speed is
reached.
Use the Speed Damping and Turn Damping parameters (see
5.3.7.16) to adjust the
point where the damping starts.
0%: No damping
100%: Maximum damping.
Damping point
Time
Speed
57
The
Min To Max Decel Ratio parameter (section 5.3.7.17) defines the slope at the end
of the curve before the final speed is reached, as a percentage of the
acceleration / deceleration slope before damping has started.
4%: The end acceleration / deceleration is 4% of the acceleration / deceleration
before damping, which gives a very smooth curve.
100%: The end acceleration / deceleration is 100% of the acceleration / deceleration
before damping, which effectively results in no damping at all.
Soft-Start Acceleration
The Damping Point only affects the end of the acceleration curve in most cases. To
provide a smooth start from a standstill when the joystick is suddenly deflected to
100% (for example with a switched joystick) use
Soft-Start Acceleration (see 5.3.9.2) in
combination with the
Soft-Start Time parameter (see 5.3.8.6).
100 %
Damping point
4 % Ratio
Damping point
100 % Ratio
Time Time
4 %
100 %
100 %
100 %
Speed
Speed
Soft-Start Time
Time
Speed