The Fail Safe function determines the response of the
receiver when the receiver system is turned on and if
there is an interruption in transmission between the
transmitter and receiver. Servo outputs can be pro-
grammed with pre-defined signals to prevent unwant-
ed events, e.g. retractable landing gear will not close
unexpectedly.
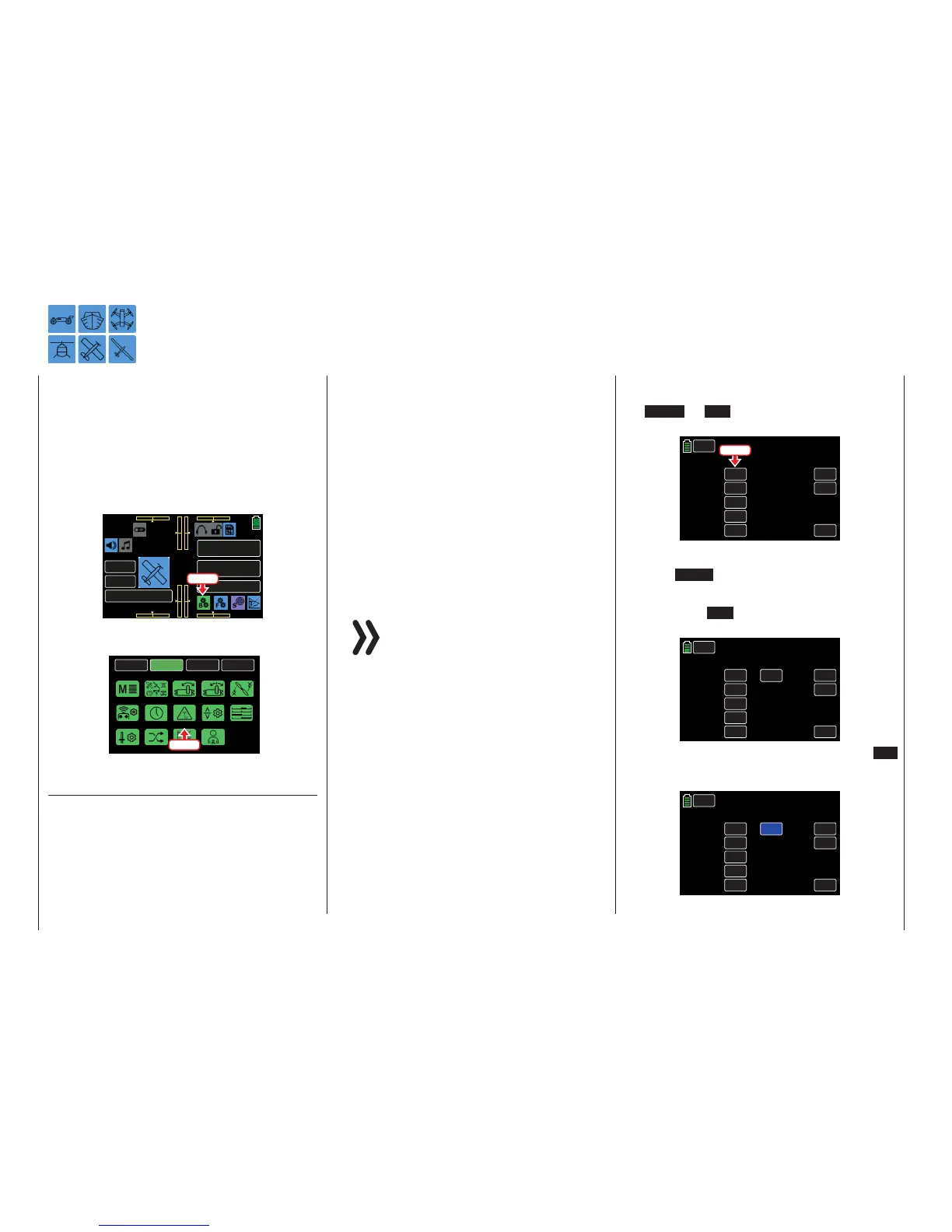
To configure the fail safe settings, from the main dis-
play press the BASE menu gear icon (green “B”) to
bring up the BASE submenu screen:
000
000
000
000
mz
000%
000%
BATT TIME 00: 01: 23
MODELLNAME 1
M - 1
PHASE 1
000:00.0
000:00.0
4.2V
0:01:23
Press
From the BASE submenu display, press the Fail Safe
icon:
BACK
SYSTEM
BASE
FUNCTION
Model Sel
E.P.A
Model Type
REV/SUB
THR.CUT
Timer
TX ctl
Fail Safe
Trim Step
Servo
Out.Swap
CTL Set
Announce
Telemetry
Press
Fail Safe
The HoTT system provides greater reliability, when
compared to the classic PPM technology, because
the microprocessor in the HoTT receiver can process
both undistorted and distorted control signals from
the transmitter. When the signals are excessively dis-
torted or garbled, for example from noise, the proces-
sor replaces them with saved control signals that will
place the receiver into Hold or Fail Safe Mode. This
Fail Safe
In the Event of a Malfunction
eliminates intermittent disturbances, such as drops in
field strength, which would otherwise lead to "wob-
bles" or servo output malfunctions such as retractable
landing gear closing unexpectedly.
Function description
The Fail Safe function determines the response of the
receiver when turning on the receiver system and if
there is an interruption in transmission from the trans-
mitter to receiver.
The following options are available to the servos con-
nected to the receiver Outputs 1 to 12:
• When the receiver is powered on and until there
is no signal from the transmitter, defaults to the
positions saved in the receiver independent from
receiver settings HOLD or F/S.
Notice
Unless reprogrammed, the standard default
setting is the central position.
• When transmission connection is interrupted or
encounters interference:
1. HOLD - if transmission interference occurs, all
servos remain at their current position until a
new, correct control signal is received by the
receiver.
2. F/S - if the receiver is in the HOLD position and
there is interruption in the transmission con-
nection for a specified amount of time, servos
move to a previously programmed position.
Programming
To change between Hold and Fail Safe modes, press
the HOLD or F/S button in the MODEcolumn in
the appropriate channel line:
BACK
CH
CH 1.
CH 2.
CH 3.
CH 4.
Delay
STO
SET
HOLD
HOLD
HOLD
HOLD
0.25s
MODE
SET
NEXT
Fail Safe
Press
Tip
Press the NEXT button to view the next two channel
display screens.
By changing to F/S, value field defaulting to 000%
appears in the SET column:
BACK
CH
CH 1.
CH 2.
CH 3.
CH 4.
Delay
STO
SET
F/S
HOLD
HOLD
HOLD
0.25s
MODE
SET
NEXT
Fail Safe
000%
To set the fail safe position, press to highlight the F/S
value field. In the example below, the fail safe for CH1
is being set:
BACK
CH
CH 1.
CH 2.
CH 3.
CH 4.
Delay
STO
SET
F/S
HOLD
HOLD
HOLD
0.25s
MODE
SET
NEXT
Fail Safe
000%
80 Base menu - Fail safe

 Loading...
Loading...








