IS810N-INT Series Servo System User Manual (Brief)Chapter 6 Commissioning Software
- 157 -
2) Jogging via the Inovance servo commissioning software in speed mode
Open the Inovance servo commissioning software > Special servo function > Speed jog
operating interface. Switch the drive to the non-bus control mode (H02-00 is not 9). After
selecting a corresponding axis from
Axis selection
, set a jog speed. Switch the servo state to
ON
, and perform forward/reverse jogging by pressing and holding the forward/reverse running
arrow.
3) Jogging via the keypad in position mode
Switch to H0D-08 on the keypad to enter the position jogging mode, and the keypad displays
the default jogging speed. Press the UP/DOWN key to set the jogging speed, and press the
ENTER key to enter the jogging state. The keypad displays "JOG-P". Then, press the UP/
DOWN key to perform forward or reverse jogging. Press the MODE key to exit the jogging
mode.
Relevant objects:
H06-12 Name
Jogging acceleration/
deceleration time constant
Setting &
Effective
Any
setting
Immediate
Data
Structure
-
Data
Type
Uint16
2006-0Dh Access RW Mapping YES
Control
Mode
ALL
Data
Range
0 to
65535 (ms)
Default 10
Set the time constant for the servo motor to accelerate from 0 RPM to 1000 RPM.
6.1.4 Rotating Direction Selection
Set H02-02 (2002-03h) to change the motor rotating direction without changing the polarity of
the input reference.
Relevant objects:
H02-02 Name
Rotating direction
selection
Setting &
Effective
At stop
Power-on again
Data
Structure
-
Data
Type
Uint16
2002-03h Access RW Mapping -
Control
Mode
ALL Data Range 0 to 1 Default 0
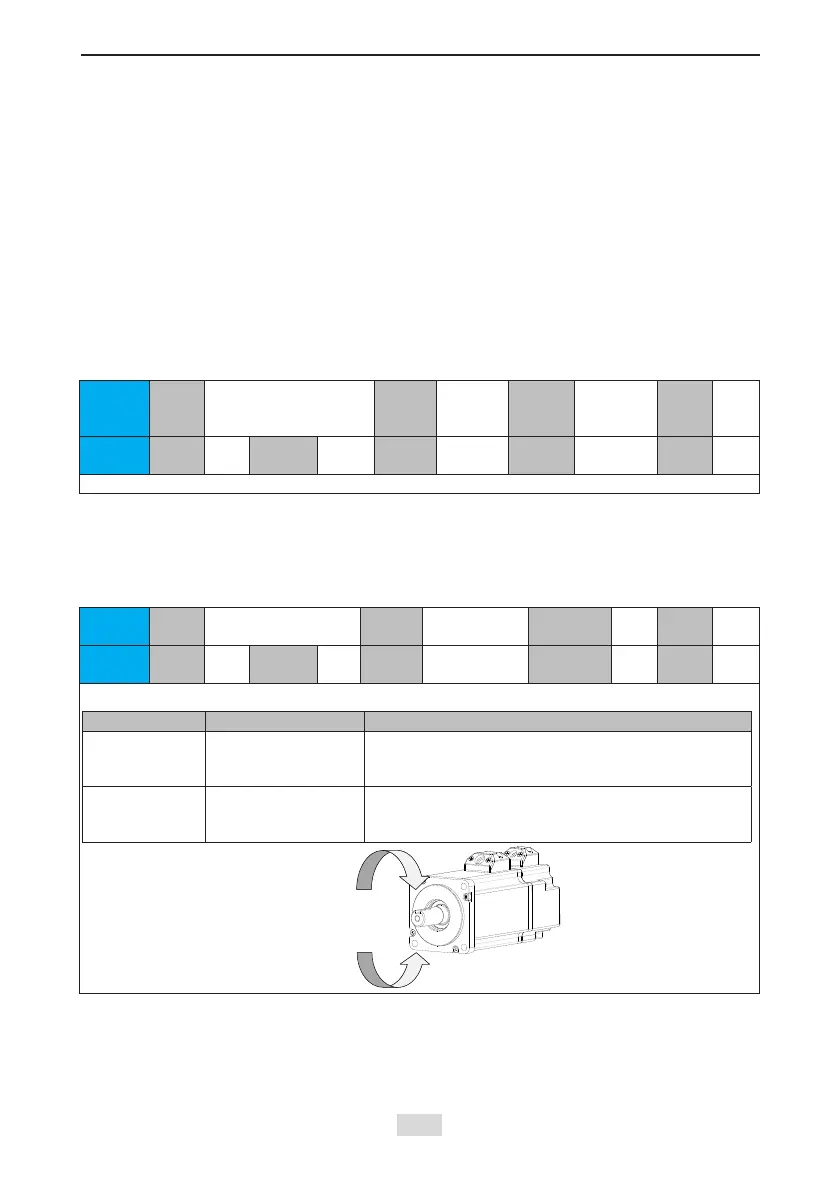
It sets the motor forward direction viewed from the motor shaft side.
Value Meaning Description
0
CCW direction as the
forward direction
When a forward command is input, the motor rotates in CCW
direction viewed from the motor shaft side, that is, the motor
rotates counterclockwise.
1
CW direction as the
forward direction
When a forward command is input, the motor rotates in CW
direction viewed from the motor shaft side, that is, the motor
rotates clockwise.
The change of H02-02(2002-03h) setting does not affect the output pulse form and positive/
negative attribute of monitored parameters of the servo drive.
The direction of "forward drive" in the limit switch function are the same as the direction set in
H02-02(2002-03h).
Clockwise
(CW)
Counterclockwise
(CCW)
 Loading...
Loading...