162 Kollmorgen - December 2011
MMC Smart Drive Hardware Manual - 460V 3 PHASE MMC SMART DRIVE NEXTGEN
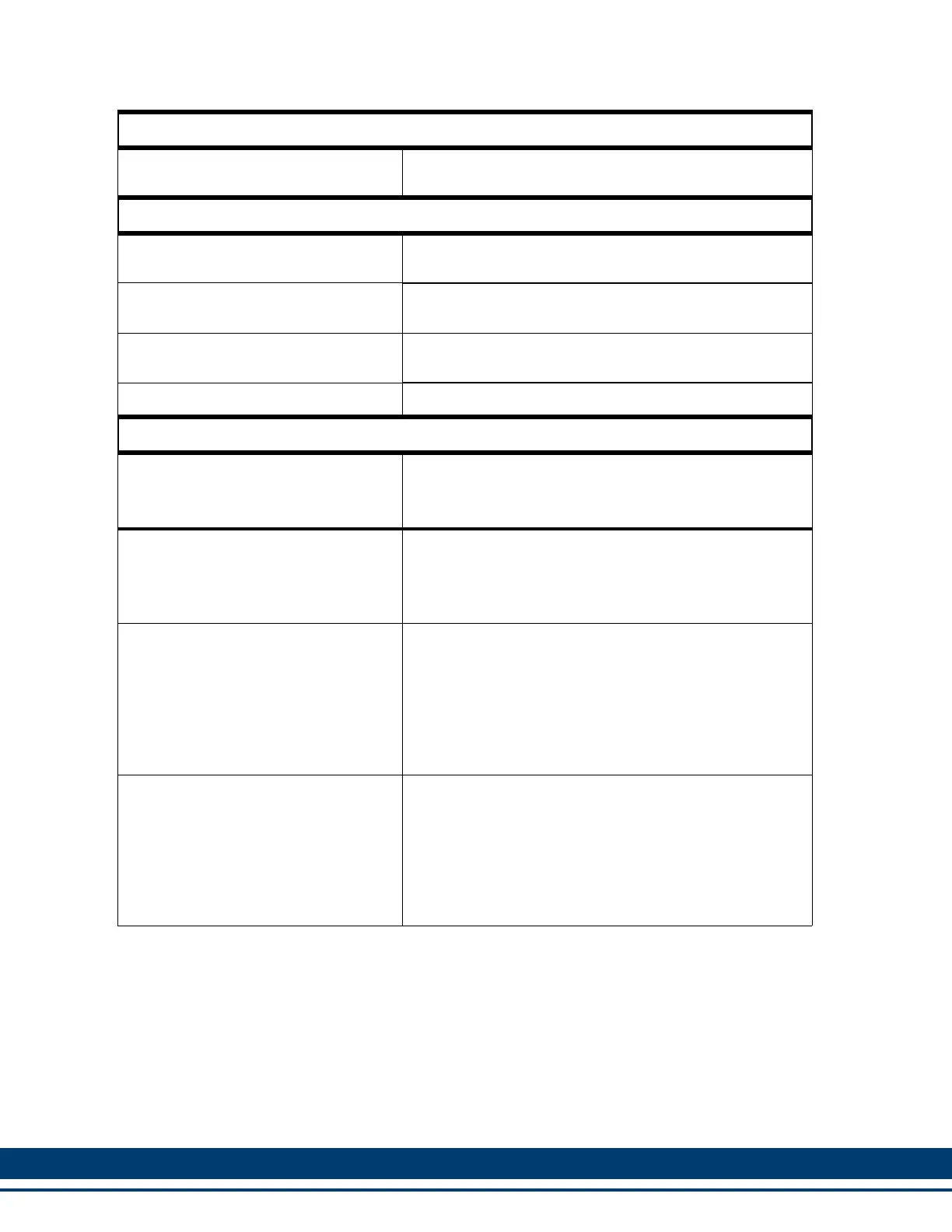
General Purpose Analog Output
Output Characteristics
-10VDC to +10VDC
16 bit effective resolution
Digital Link In/Out Ports
“In” port
Sends and receives high speed data to and from connect-
ed MMC-SD’s “Out” port.
“Out” port
Sends and receives high speed data to and from connect-
ed MMC-SD’s “In” port.
Cable Type
Shielded, Straight Pinned, CAT5 or better (CAT5e, CAT6,
etc.)
Maximum Cable Length 30 m (98.4 ft)
Drive I/O Connector Encoder Emulation Output
F1 Motor Feedback Type
•Input Limit
•Maximum Encoder Emulation Output Rate
•Emulated Output Description
Incremental Encoder
•720 KHz
•2.88 M counts/sec.
•The motor encoder A/B/I inputs are electrically buffered
and retransmitted via the Drive I/O connector.
High Resolution Encoder
•100 KHz
•400 K counts/sec.
•The encoder SIN/COS signals are electrically squared
and retransmitted as A/B. The index mark “I” is
synthesized by the drive control DSP. Absolute position
information is not available via the Encoder Emulation
Output.
Resolver
•500 RPS
•2.00 M counts/sec.
•The resolver inputs are converted to 1024 lines/4096
counts per revolution of A/B encoder output. The Drive
synthesizes the index mark “I” once per revolution of
the resolver. Absolute position information is not
available via the Encoder Emulation Output.
 Loading...
Loading...