10 Parameter List
142 of
212
PumpDrive 2
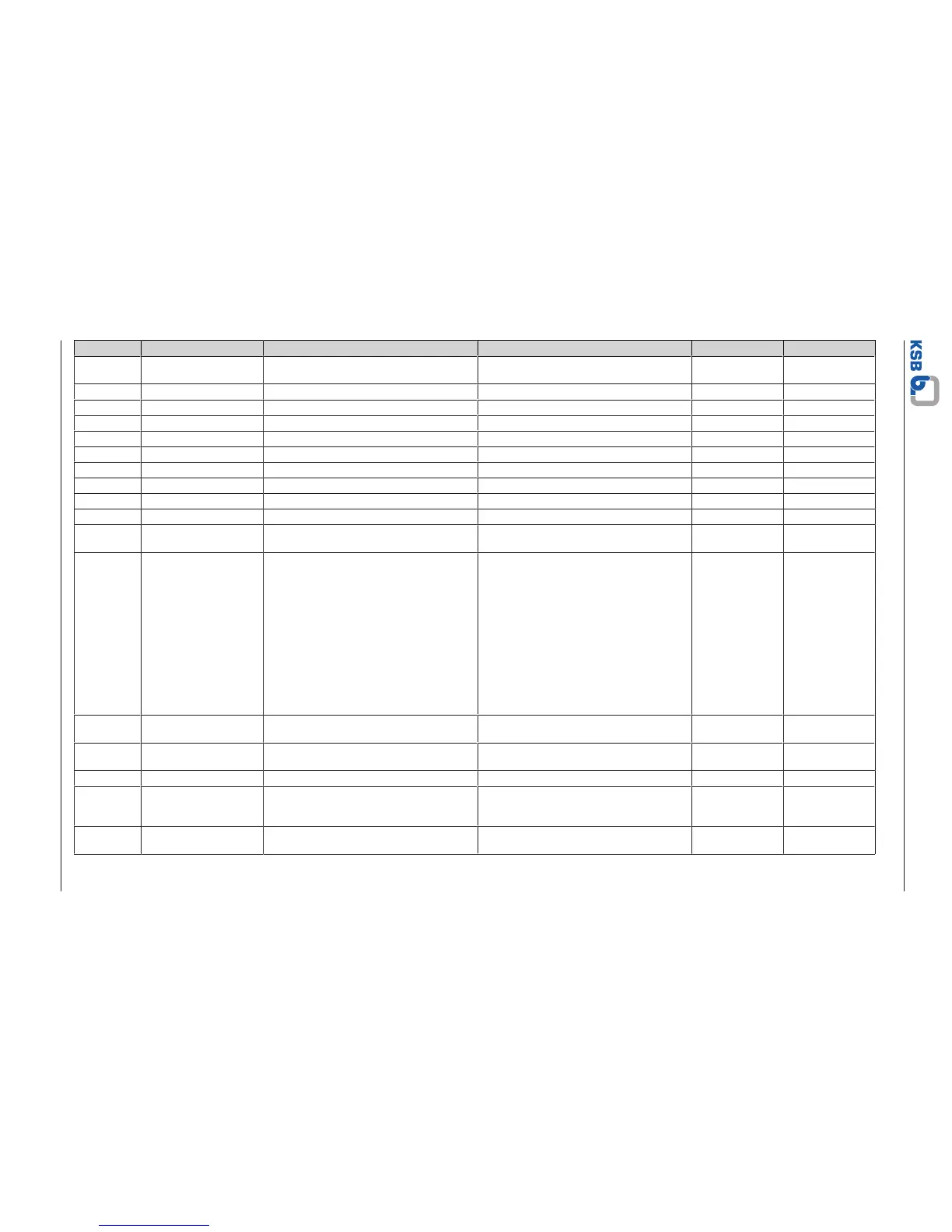
Parameter Description Help text Possible settings Unit Factory setting
3-3-2 V/f Control for
Asynchronous Motor
3-3-2-1 V/f Voltage 0 Data points for the V/f characteristic 0,00 … 15,00 % 2
3-3-2-2 V/f Voltage 1 Data points for the V/f characteristic 0,00 … 100,00 % 20
3-3-2-3 V/f Frequency 1 Data points for the V/f characteristic 0,00 … 100,00 % 20
3-3-2-4 V/f Voltage 2 Data points for the V/f characteristic 0,00 … 100,00 % 40
3-3-2-5 V/f Frequency 2 Data points for the V/f characteristic 0,00 … 100,00 % 40
3-3-2-6 V/f Voltage 3 Data points for the V/f characteristic 0,00 … 100,00 % 80
3-3-2-7 V/f Frequency 3 Data points for the V/f characteristic 0,00 … 100,00 % 80
3-3-2-8 V/f Voltage 4 Data points for the V/f characteristic 0,00 … 100,00 % 100
3-3-2-9 V/f Frequency 4 Data points for the V/f characteristic 0,00 … 100,00 % 100
3-3-3 Vector Control for
Asynchronous Motor
3-3-3-1 Start Automatic Motor
Adaptation
Function used to start automatic motor
adaptation (AMA).
1. Offline Calculation: Using the nominal
data of the motor as a basis, the extended
motor data required for vector control is
calculated.
2. Standard AMA: The extended motor data
is determined by taking a measurement
with the motor being at a standstill.
3. Extended AMA: The extended motor data
is determined by taking a measurement
with the motor running at approximately
10% of its nominal speed.
▪ Run
▪ Extended AMA – Motor Running
▪ Standard AMA – Motor at Standstill
▪ Offline Calculation
3-3-3-2 RS Stator Phase
Resistance
Extended motor data: Stator phase
resistance
0,000 … 5000,000 Ohm Motor-specific
3-3-3-3 LS Stator Phase
Inductance
Extended motor data: Stator phase
inductance
0,0 … 5000,0 mH Motor-specific
3-3-3-4 TR Rotor Time Constant Extended motor data: Rotor time constant 0,0 … 5000,0 ms Motor-specific
3-3-3-5 KM Magnetisation
Coefficient
Extended motor data: The magnetisation
coefficient describes the magnetic coupling
between the stator and rotor of the motor.
0,0000 … 100,000 0 Motor-specific
3-3-4 Vector Control for
SuPremE