Chapter 3 Before positioning
3- 52
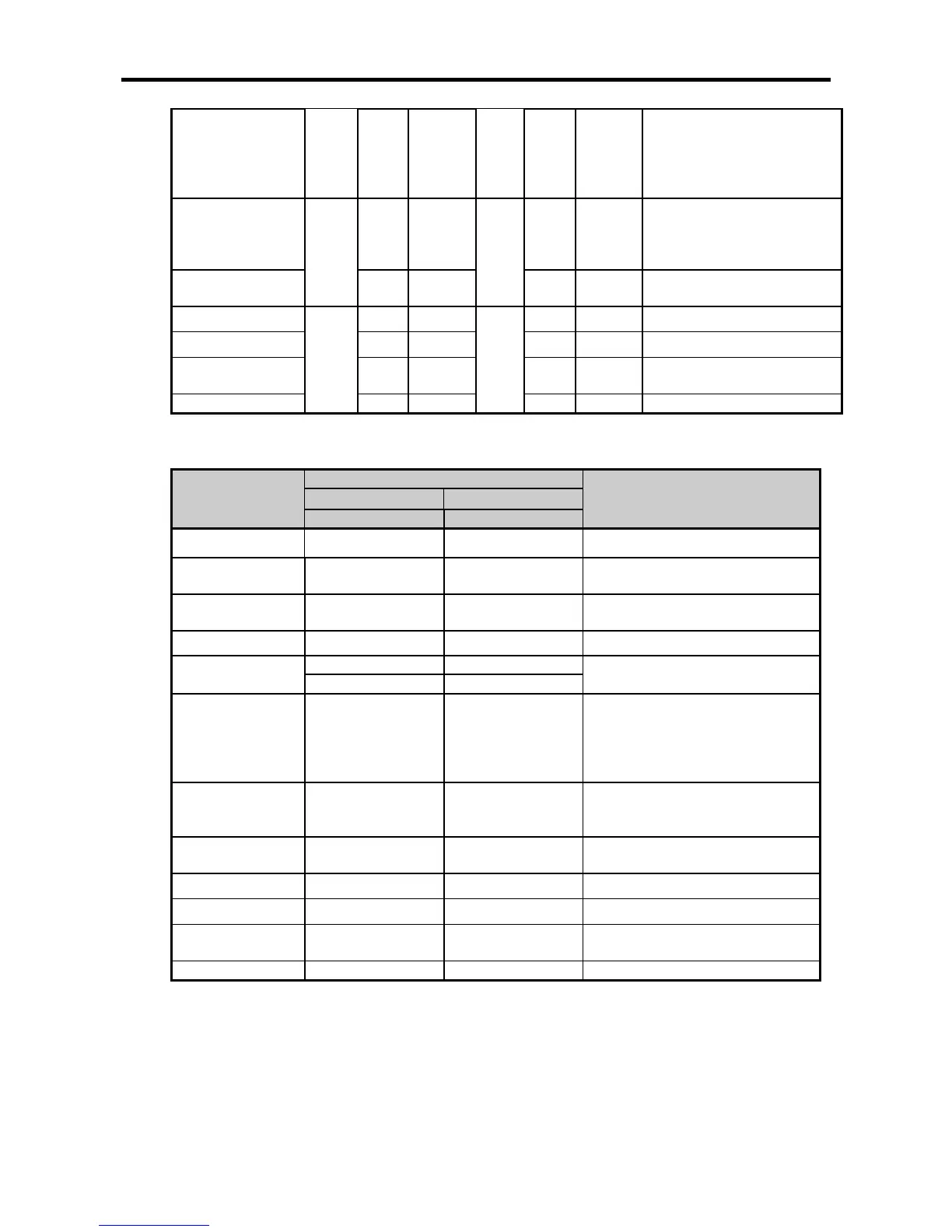
Upper/lower limit
detection of S/W
allowed during
constant speed
operation
4 K4684 4 K5084
0: detection not allowed,
1: detection allowed
Return-to-origin
method
K478
0,1 K4780~1
K518
1 K5180~1
0: approximate
origin/origin(OFF)
1: approximate origin/origin (On)
2: approximate origin
Return-to-origin
direction
2 K4782 2 K5182
0: normal direction, 1: backward
direction
Use for positioning
K487
0 K4870
K527
0 K5270 0: use, 1: no use
Pulse output level 1 K4871 1 K5271 0: low Active,1: high Active
Use of upper/lower
limit
2 K4872 2 K5272 0: no use, 1: use
Pulse output mode 3 K4873 3 K5273 0: CW/CCW, 1: PLS/DIR
(b) XEC bit area flag
Variables
Device area
Status Axis X Axis Y
Address Addreess
Start signal %KX6864 %KX7024 Indirect start at rising edge
Normal direction jog %KX6865 %KX7025
0: stop jog,
1: normal direction jog operation
Backward direction
jog
%KX6866 %KX7026
0: stop jog,,
1: normal direction jog operation
Jog high/low speed %KX6867 %KX7027 0: jog low speed, 1: jog high speed
M code output mode
%KX7489 %KX8129
0: NONE, 1: WITH, 2: AFTER
%KX7490 %KX8130
Upper/lower limit
detection of S/W
allowed during
constant speed
operation
%KX7492 %KX8132
0: detection not allowed,
1: detection allowed
Return-to-origin
method
%KX7648-49 %KX8288-89
0: approximate origin/origin(OFF)
1: approximate origin/origin (On)
2: approximate origin
Return-to-origin
direction
%KX7650 %KX8290
0: normal direction, 1: backward
direction
Use for positioning %KX7792 %KX8432 0: use, 1: no use
Pulse output level %KX7793 %KX8433 0: low Active,1: high Active
Use of upper/lower
limit
%KX7794 %KX8434 0: no use, 1: use
Pulse output mode %KX7795 %KX8435 0: CW/CCW, 1: PLS/DIR
(c) Starting Signals
1) The starting signals conducts positioning operation according to the current operation step
number (axis X: K426(%KW426), axis Y: K436(%KW436)) without setting the step number unlike
indirect or direct starting.
2) Since the current operation step area is for read only, if you want to change the operation step
number, you need to use the starting step number change instruction (SNS, APM_SNS).
3) The following program is an example of the program that indirectly starts with the operation data
displayed in the current step number (K426) on axis X by setting the starting signal whenever