12.7 H: TERMINALS
698 SIEPYEUOQ2A01G AC Drive Q2A Technical Manual
WARNING! Sudden Movement Hazard. When you use the Baseblock command with hoist applications, make sure that you
close the holding brake when you input the Baseblock command and the drive shuts off its output. Failure to do obey can cause
death or serious injury if the load moves or falls when motor suddenly coasts after you input the Baseblock command.
■ 20 to 2F: External Fault
Setting Function Description
20 to 2F External Fault
Sets a command to stop the drive when a failure or fault occurs on an external device.
If an external fault is input to the drive, the keypad will show EFx [ExtFault DIx], where x is the number of the
terminal (terminal DIx) to which the external fault signal is assigned. For example, when an external fault signal
is input to terminal DI3, the keypad will show EF3.
Use these conditions to select the value to set in H1-xx:
• Signal input method from peripheral devices
• External fault detection method
• Motor stopping method (operation after external fault detection)
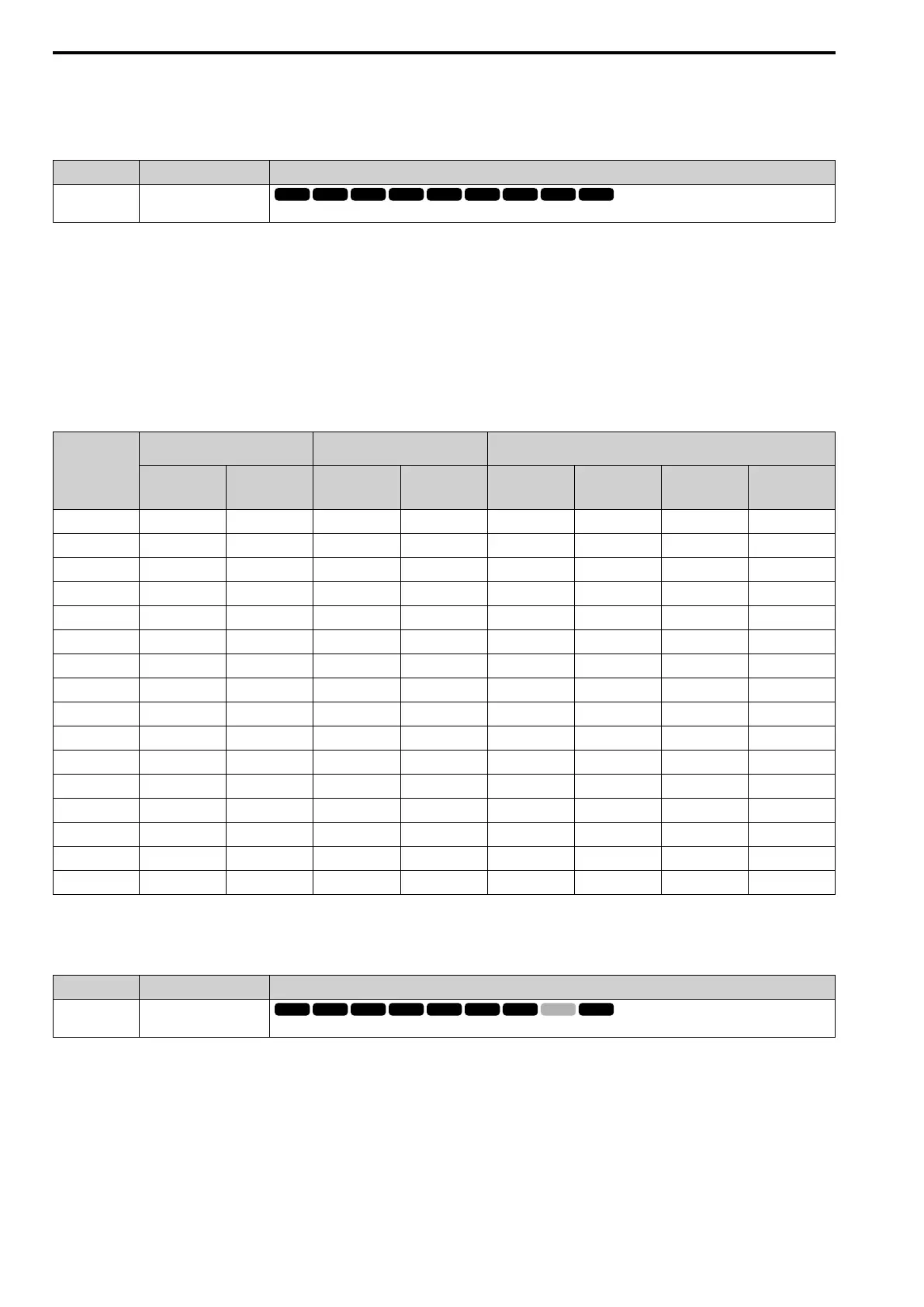
Table 12.40 shows the relation between the conditions and the value set to H1-xx.
Table 12.40 Stopping Methods for External Fault
Setting
Signal Input Method from
Peripheral Devices
*1
External Fault Detection Method
*2
Stopping Method
N.O. N.C.
Always
Detected
Detected
during RUN
Only
Ramp to Stop
(Fault)
Coast to Stop
(Fault)
Fast Stop
(Fault)
Continuous
Operation
(Alarm Only)
20 x - x - x - - -
21 - x x - x - - -
22 x - - x x - - -
23 - x - x x - - -
24 x - x - - x - -
25 - x x - - x - -
26 x - - x - x - -
27 - x - x - x - -
28 x - x - - - x -
29 - x x - - - x -
2A x - - x - - x -
2B - x - x - - x -
2C x - x - - - - x
2D - x x - - - - x
2E x - - x - - - x
2F - x - x - - - x
*1 Set the terminal to N.O. (detects external fault when switched ON) or N.C. (detects external fault when switched OFF).
*2 Set the drive to always detect each fault or to detect only during run.
■ 30: DCInj Cmd
Setting Function Description
30 DCInj Cmd
Sets the command to use DC Injection Braking to stop the motor.
If you input the Run command or JOG command, it will cancel DC Injection Braking.
Figure 12.78 shows the DC Injection Braking function: