– When the difference between the reference values and the feed‐
back value changes, more time is needed to compensate the im‐
pact of continuous integral adjustment for the integral value to fol‐
low the changing trend.
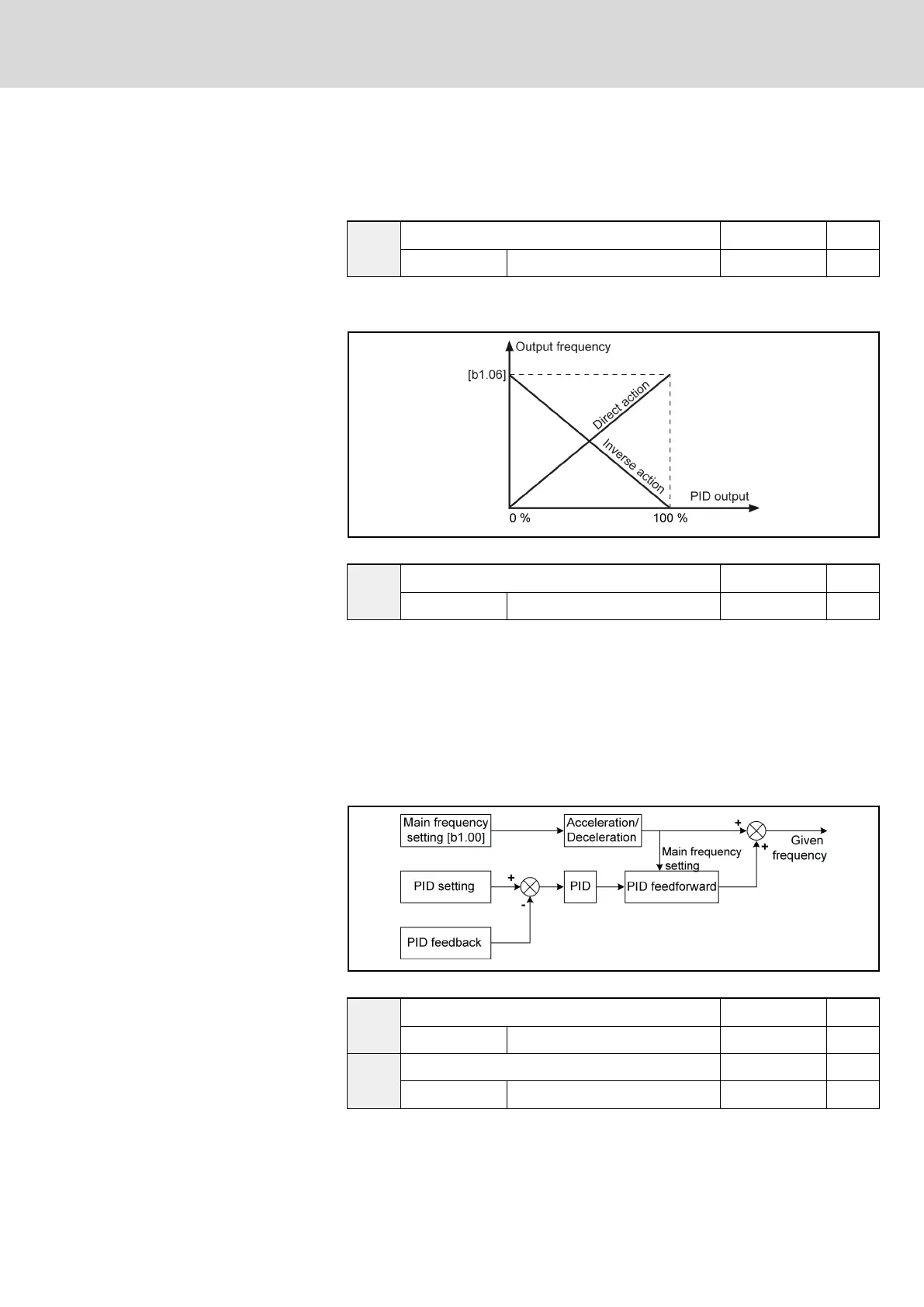
E3.10
PID output action Factory default 0
Setting range 0, 1 Minimum unit 1
● 0: Direct action
● 1: Inverse action
Fig. 7-44: PID adjustment
E3.11
PID feedforward activation Factory default 0
Setting range 0, 1 Minimum unit 1
Used to amend the main frequency setting with the fine tuning signal of PID
output.
● 0: PID feedforward deactivated. If "PID control mode" [E3.00] ≠ 0, the
given frequency is set by PID output; if [E3.00] = 0, the given frequency
is set by parameter "Frequency setting mode" b1.00.
● 1: PID feedforward activated. If "PID control mode" [E3.00] ≠ 0, the giv‐
en frequency is set by the result of PID output plus the main frequency
setting; if [E3.00] = 0, the given frequency is set by parameter "Frequen‐
cy setting mode" b1.00.
Fig. 7-45: PID feedforward
E3.12
PID feedforward limit Factory default 10.0
Setting range 0.0...100.0 % Minimum unit 0.1
E3.14
PID feedforward limit offset Factory default 0.0
Setting range 0.0...50.0 % Minimum unit 0.1
The two parameters are both used for upper limitation of PID feedforward.
DOK-RCON02-FV*********-IB08-EN-P Bosch Rexroth AG 153/259
Rexroth Frequency Converter Fv
Parameter Settings