I ntroduction CDHD
10 User Manual
1 .2 CDH D M odels
The various m odels in t he CDHD servo drive series are differentiated by m eans
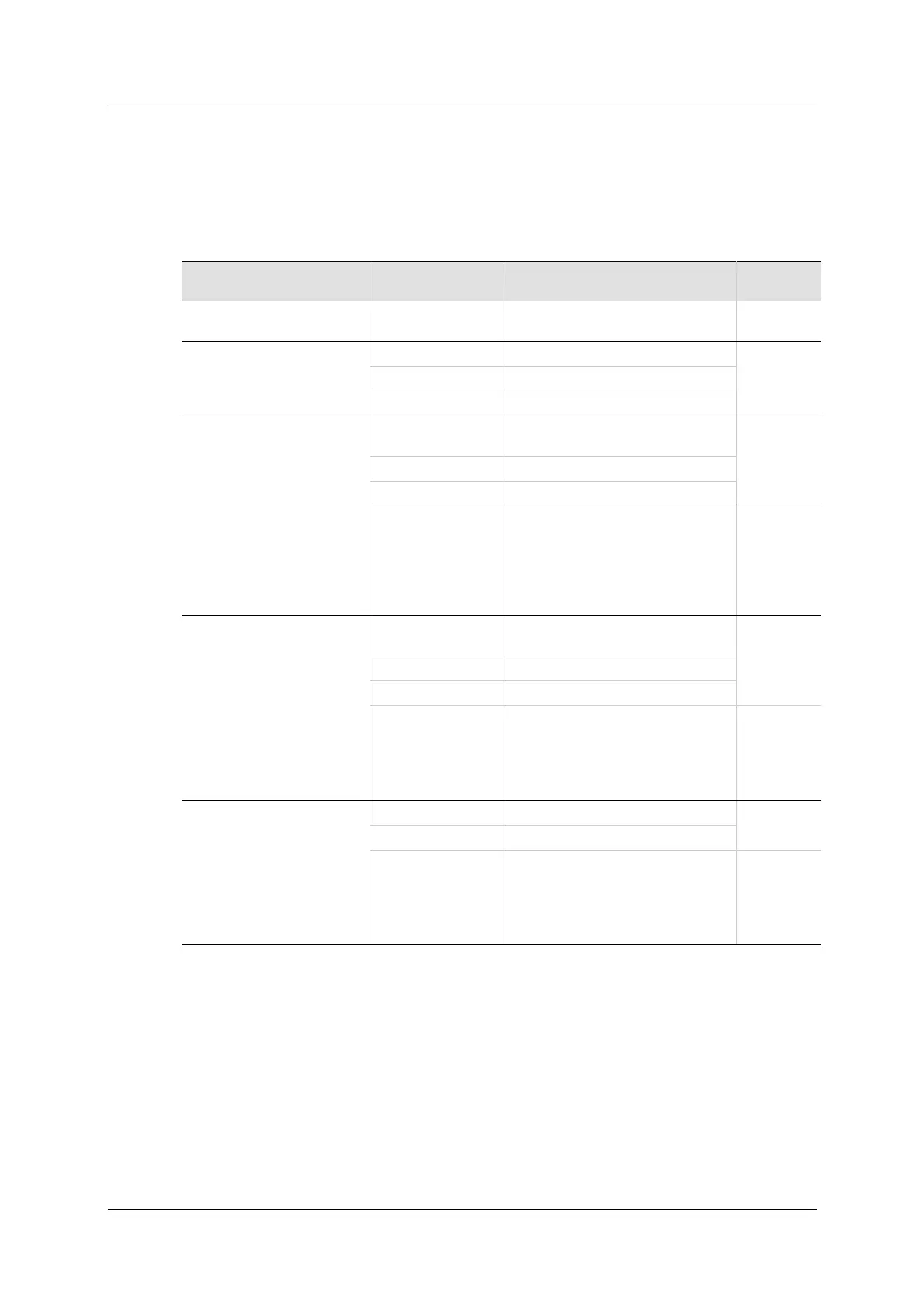
of the communication m ethods and protocols t hey use. The following t able
presents the different models and their distinguishing characteristics.
Ta ble 1 - 1 . CDH D M o de ls - Com m unica t ion and Protocols
CD H D Model Physica l La ye r Com m u nicat ion Prot ocol
Progra m
La ngua ge
CD H D Pow er Block ( PB) PWM signals PWM signals
PMAC
(Delta Tau)
CD H D ( AP)
Standard CDHD m odel.
Se r ial ( RS232) ASCI I comm ands VarCom
Analog ± 10V
Pulse Train AB signals
CD H D CAN ( AF)
A CAN drive, which uses
CANopen protocol.
Referred to as
CDHD CANopen drive.
Serial
(USB| RS232)
ASCII com mands VarCom
Analog ± 10V
Pulse Train AB signals
CAN
Com m unication:
CANopen – all 1000h object s
Manufacturer-Specific:
CANopen – all 2000h objects
Standard Servo-Drive (Motion):
CANopen – all 6000h objects
VarCom
CANopen
CD H D Eth e r CAT ( EC)
An EtherCAT drive, which
uses CAN ope n o ver
Et herCAT ( CoE) protocol.
Serial
(USB| RS232)
ASCII com mands VarCom
Analog ± 10V
Pulse Train AB signals
Et he rn e t Com m unication: Et h e r CAT
Manufacturer-Specific:
CANopen – all 2000h objects
Standard Servo-Drive (Motion):
CANopen – all 6000h objects
VarCom
CANopen
CD H D EtherCAT ( EB)
An EtherCAT drive, which
uses CANop e n ove r
Et herCAT ( CoE) protocol
Serial (USB) ASCII commands VarCom
Analog ± 10V
Et he rn e t Com m unication: Et h e r CAT
Manufacturer-Specific:
CANopen – all 2000h objects
Standard Servo-Drive (Motion):
CANopen – all 6000h objects
VarCom
CANopen