CDHD Tuning
User Manual 223
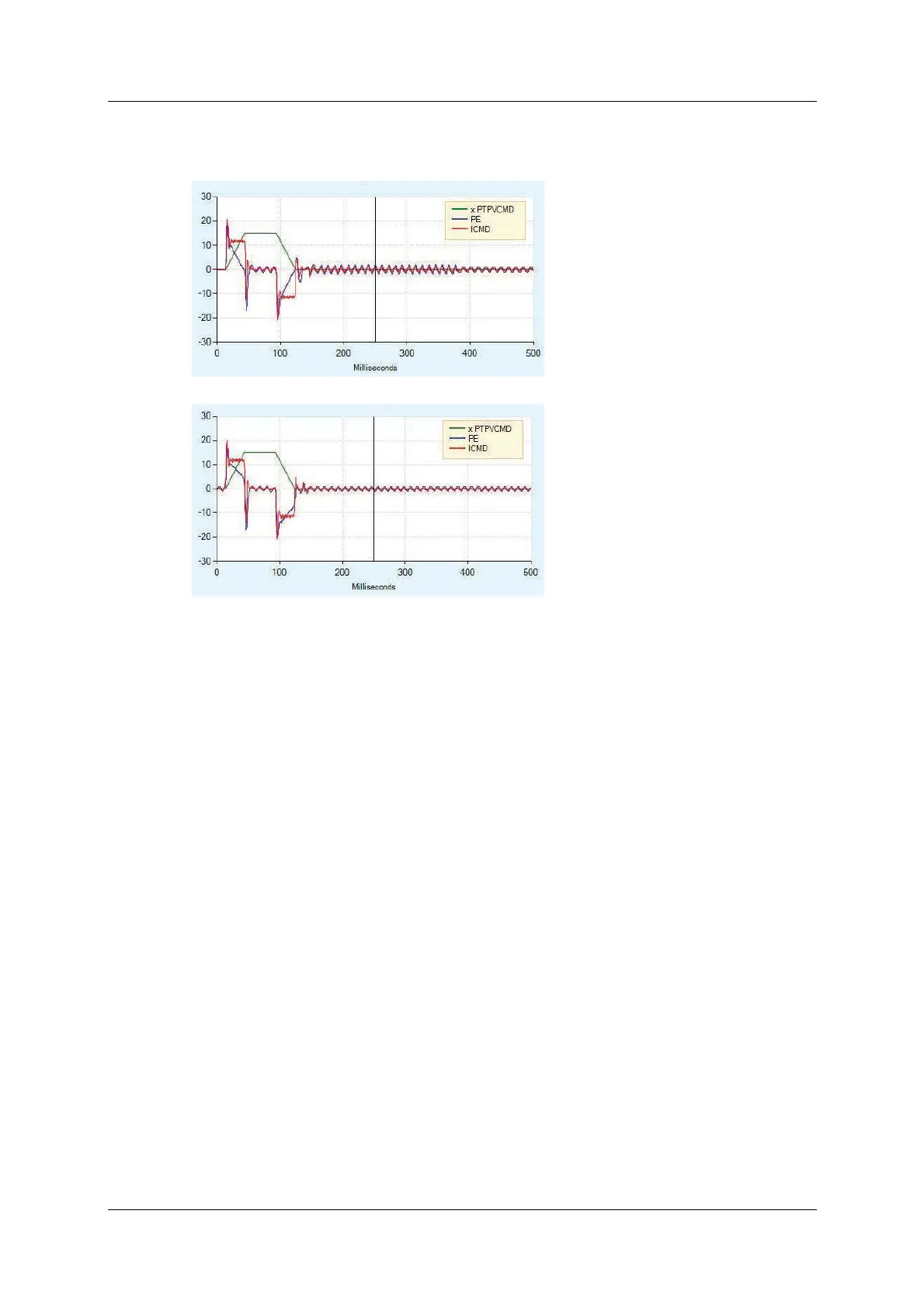
Result: Position error is slightly reduced; oscillations at stop are acceptable (± 1
encoder count ); no overshoot of position error at end of deceleration phase
(stopping point).
KNLI value too high; posit ion error
oscillations at st op; overshoot of
posit ion error
KNLI selected value
Figur e 9 - 3 9 . KN LI Tu nin g
9 .1 3 Flexibility Com pe nsa t ion Tunin g
The flexibility compensation param eters reduce the vibrations induced to the
load by abrupt changes in acceleration (jerk), and reduce tracking error. They
also serve t o minimize overshoot and settling tim e.
N LPEAFF (HD Flexibility Com pensation), defined in Hertz, is set according
to the rigidity of the system . Rigid systems require a high value. Systems
with high load inertia and flexible couplings require lower values; the normal
range is 400 t o30 Hz) . I f not used, set to 5000 Hz.
N LAFFLPFH Z (HD Spring Filter), defined in Hertz, applies a low pass filter
on the accelerat ion of the comm and position used to perform the
com pensation. This acceleration is calculated from the input com mand
position, and m ay be noisy if the input comm and position has a relatively
low resolution, as for exam ple a pulse train input. Application of the low
pass filter NLAFFLPFHZ smoothes the calculated acceleration of the
com mand position, and should be used whenever noisy operation is
observed while applying the parameter NLPEAFF.
Best tuning: Typically, t he highest frequency is 400 Hz. Thus, for heavily
loaded and flexible systems, typical range for NLPEAFF is 400 to 30 Hz.
 Loading...
Loading...

