CDHD Application Setup
User Manual 143
cycles. I f running the motor in one direction, the num ber of revolutions required
for the calibration is calculated as follows:
Resolver: 128 ÷
Where MENRESPOLES is the number of individual poles in the resolver
feedback device.
For exam ple, if MRESPOLES= 4, the m otor needs t o make 64 revolutions for
calibration.
Sine encoder :
Where MENCRES is the num ber of since cycles per motor revolution or per
m ot or pitch.
6 .6 .3 M ot or Spee d Lim itat ions Du rin g Ca libr at ion
During the calibration procedure, the m ot or speed m ust not exceed the following
values:
Resolver: 3750 rpm
Sine encoder :
rpm
6 .6 .4 Ca libr at ing Resolver an d Sine Encoder
Procedu re - Resolve r Calibrat ion Usin g Te rm inal
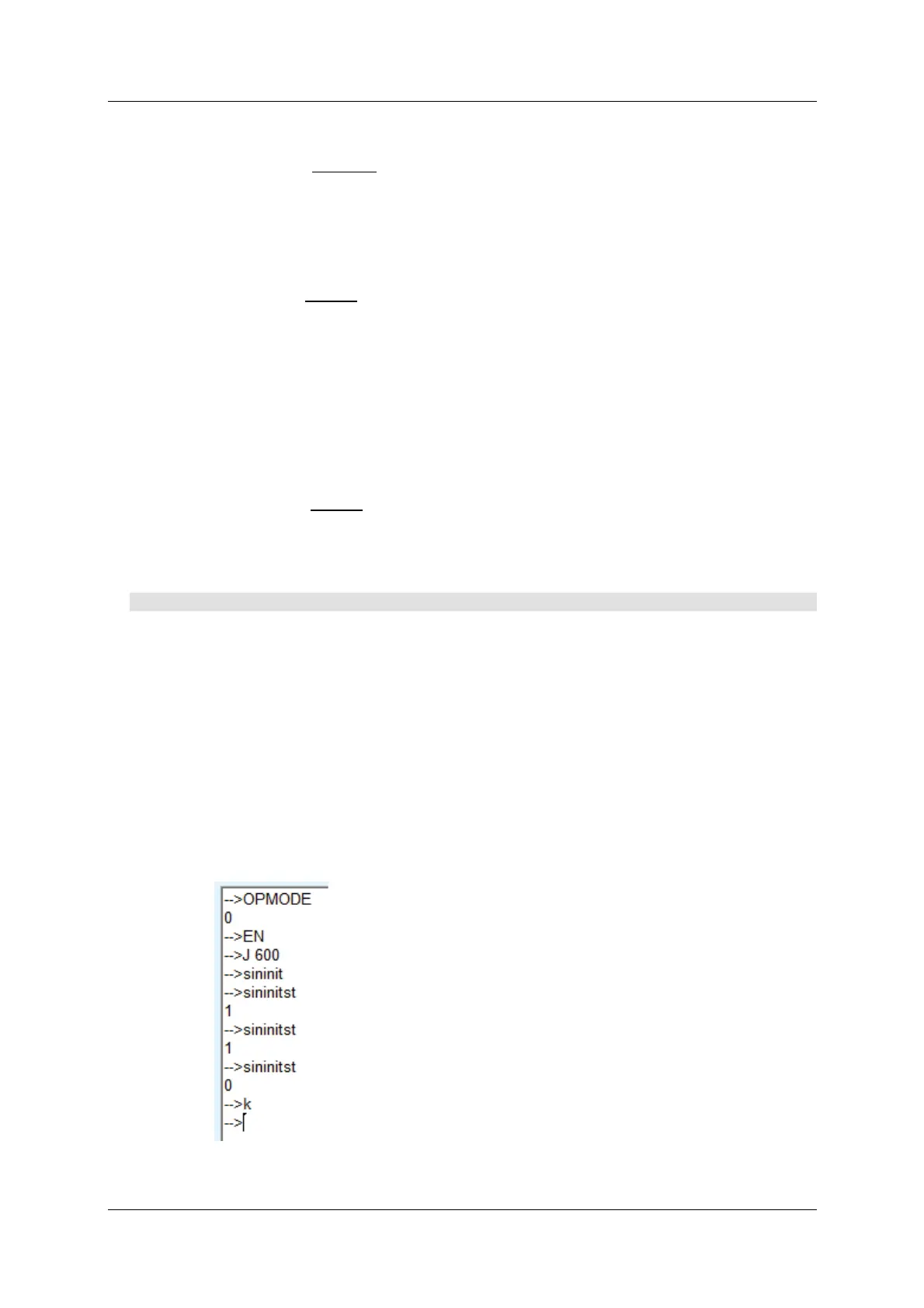
1 . I n the Terminal interface, enter the sine/ cosine calibration com mand:
SININIT <Enter>
2 . Enter a comm and to run the motor at a low speed, such as 800 rpm ,
for about 10 seconds, according t o the operation m ode of your applicat ion
(current , velocity or posit ion m ode).
3 . Enter the sine/ cosine calibration st atus comm and:
SININITST <Enter>
4 . Wait until SININITST changes to 1, and then reverts back to 0.
Ex a m ple: The m otor runs in a velocity control loop at 600 rpm, and the
calibration procedure is executed.
Figure 6 - 5 .