Tuning CDHD
222 User Manual
KN LP - Proport ional Gain
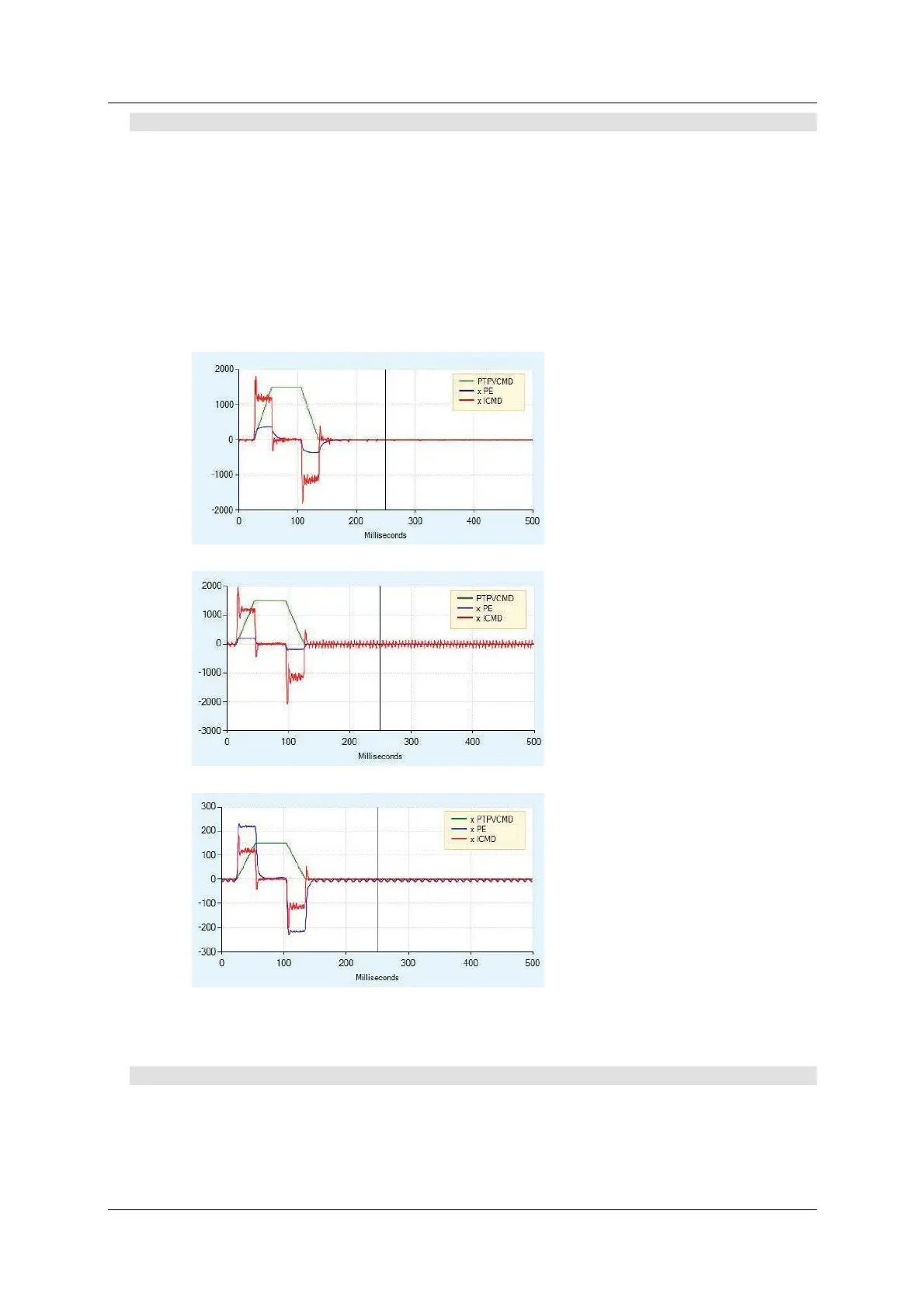
Increase KNLP until position error (PE) begins to oscillate.
As the value of KNLP increases, the shape of t he position error become square,
reflecting the constant values during acceleration and deceleration.
As the KNLP proportional gain gets higher, the position error reaches a steady
value during each phase of the movement (acceleration, plateau, deceleration).
Best tuning: Graph is as square as possible, indicating the position error is
constant during each phase of movement, and there are no oscillations during
the transition between phases (acceleration to plateau, plateau to deceleration,
deceleration to stop).
PE gets flatter during acceleration and
deceleration
KNLP value too high; vibrations at stop
KNLP selected value
Figur e 9 - 3 8 . Pr oport ional Gain Tuning
KN LI - I nte gr a l Ga in
KNLI is used to reduce the position error during m ovement and at stop.
Best tuning: Maximum value that does not create overshoot or oscillat ions.
Be st se t tling tim e : I f possible, increase KNLI until position error returns t o 0
before t he end of the deceleration phase.
 Loading...
Loading...

