CDHD Tuning
User Manual 221
KNLD selected value
Figur e 9 - 3 6 . D eriva t ive Ga in Tuning
KN LI V - De rivat ive- I nt e gr a l Ga in
I ncrease KNLI V until position error (PE) begins to oscillat e.
I ncreasing KNLIV reduces the position error, reduces sensitivity to external
perturbations, and reduces the steady state position error at stop (if exists).
Best tuning: Position error decreases as fast as possible after each movem ent
phase transition (jerk), without oscillations during transition between phases; no
overshoot of position error; oscillations at st op are acceptable (± 1 encoder
count).
Be st se t tling tim e : I f possible, increase KNLI V until posit ion error returns to 0
before t he end of the deceleration phase.
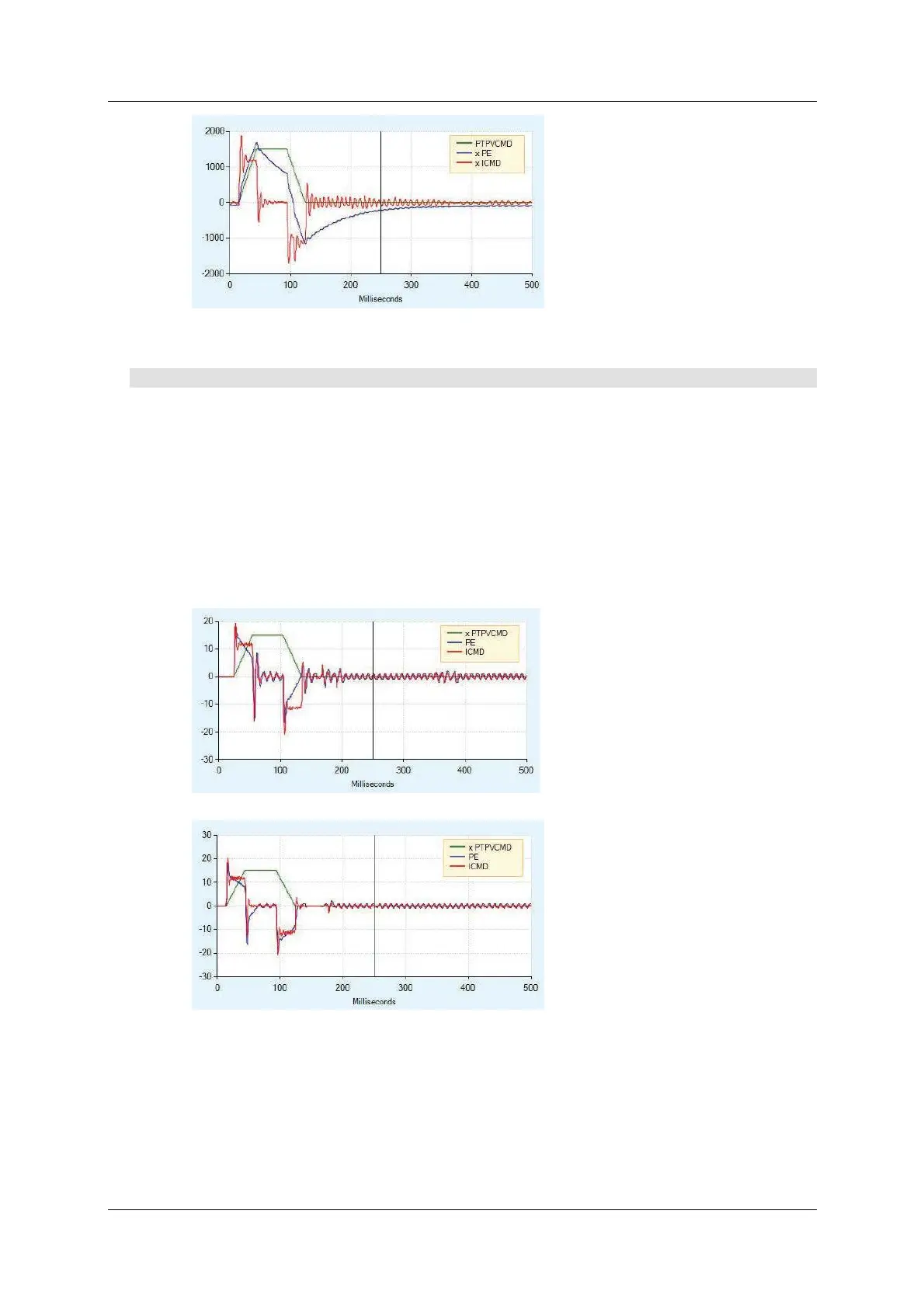
KNLIV value is too high; vibrations at
stop are too strong; overshoot of
posit ion error
KNLIV selected value;
good settling time
Figur e 9 - 3 7 . D e r ivat ive- I nt egral Gain Tunin g
 Loading...
Loading...

