CDHD Tuning
User Manual 205
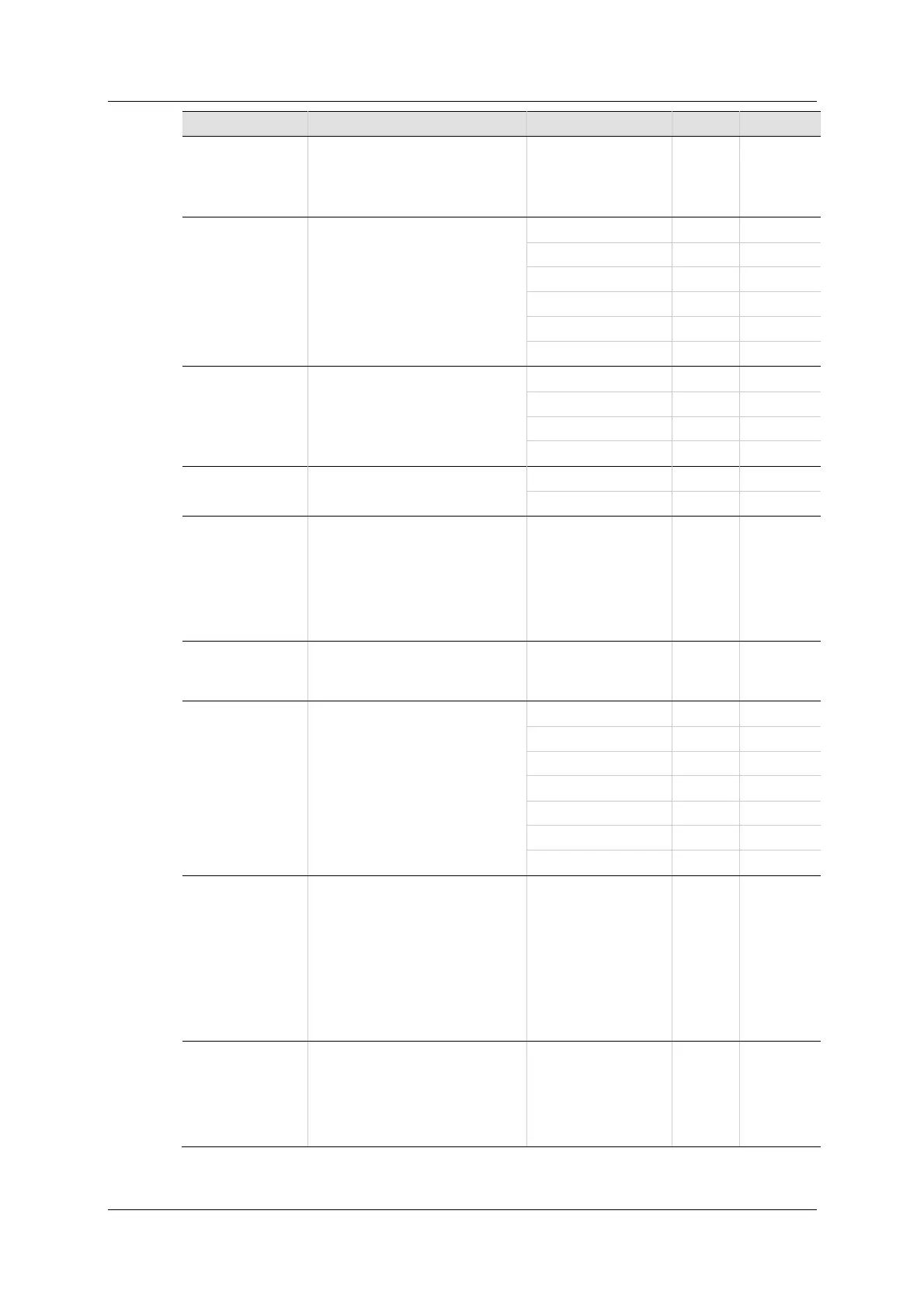
Funct ion D escript ion Pa ra m et e r Express Adv a n ce d
application is multi-axis and
sm oothing must be t he sam e for
all axes. Instead, use
MOVESMOOTHAVG with a value
between 1-15 m s.
MOVESMOOTHAVG √ Y/ N
HD Contr ol Loop
Autom atically optim ized during
the Autotuning process.
NLPEAFF √ √
NLAFFLPFHZ √ √
KNLD √ √
KNLI √ √
KNLI V √ √
KNLP √ √
Current Cont rol
N ot ch Fil t e rs
HD contr ol loop param eters. NLNOTCHBW √ √
NLNOTCHCENTER √ √
NLNOTCH2BW √ √
NLNOTCH2CENTER √ √
Current Cont rol
Low Pa ss Filt er
HD contr ol loop param eters. NLFI LTT1 √ √
NLFI LTDAMPI NG √ √
Accelerat ion
Feedforward
HD contr ol loop param eter.
Use Autotuning to optimize
parameters for achieving
minim al tracking error during
motion.
Do not use Autotuning if
overshoot is t oo large.
KNLAFRC √ Y/ N
Global Gain HD contr ol loop param eter.
Can be modified at Test stage
of Autotuning process.
KNLUSERGAIN Y/ N Y/ N
An t i- V ibra t ion
Fil t e rs
Use Autotuning to optimize
parameters for suppressing
vibration.
Do not use Autotuning if
you want t o set vibration
suppression parameters
manually, or
if the application does not
require vibration suppression.
NLANTIVIBGAIN2 Y/ N
NLANTIVIBSHARP2 Y/ N
NLANTIVIBHZ2 Y/ N
NLANTIVIBGAIN3 Y/ N
NLANTIVIBSHARP3 Y/ N
NLANTIVIBHZ3 Y/ N
NLANTIVIBQ3 Y/ N
Mom ent of
Inertia
Use Autotuning to determine the
load’s m oment of inert ia.
Do not use Autotuning if the
mom ent of inert ia of the load
varies (e.g., a multi-axis robot) ,
or if you know the exact inertia.
You can enter a value for either
Load Inertia or Load Inertia
Ratio; the software set s the
other param eter accordingly.
LMJR √ Y/ N
Vertical
Application
Use Autotuning to compensate
for the effect of gravit y when
axis m otion is vertical.
Do not use Autotuning if axis
motion is balanced (non-
vertical) in both directions.
IGRAV Y/ N