1PosInc/Analog
4.6 Functions of the 1PosInc/Analog
ET 200S Positioning
Operating Instructions, 05/2007, A5E00124871-04
143
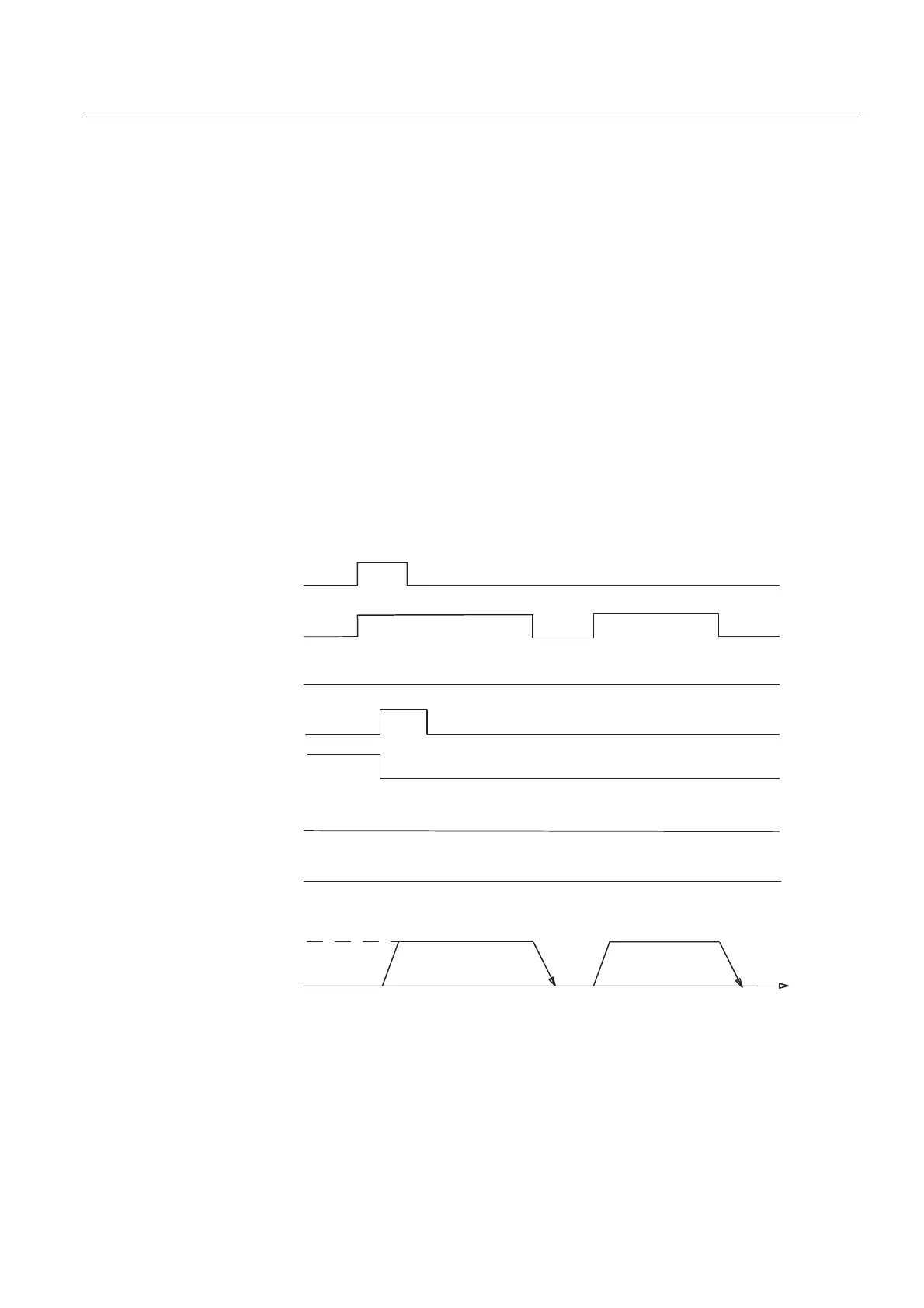
4.6.6 Inching (MODE 1)
Definition
You use inching mode to control the drive directly in a particular direction using the DIR_M or
DIR_P control bits.
You can set a voltage between 0 V and 11.7589 V (including overrange) in S7 analog value
format (you will find a detailed explanation in the
Distributed I/O Device
manual).
When you start MODE 1, the 1PosInc/Analog moves the drive with the set voltage for
inching mode (from the control interface) in the specified direction (control bits DIR_M or
DIR_P).
You stop the drive by decelerating to 0 V by setting the control bits DIR_P = 0 and
DIR_M = 0.
You can change direction using deceleration or acceleration.
You can also activate inching on an unsynchronized axis (feedback bit SYNC = 0) or when
there is a pending encoder error (feedback bit ERR_ENCODER = 1) or without an encoder
connected.
',5B3
',5B0
67$57
326B(55
326B'21(
6<1&
326B$&.
2XWSXW
YROWDJH
3DWK
Figure 4-17 Execution of Inching

 Loading...
Loading...