Machine and Setting Data 802D
A.1 List of machine data
A-217
SINUMERIK 802D sl Instruction Manual (BA), 05/2005 Edition
6FC5 397-0CP10-1BA0
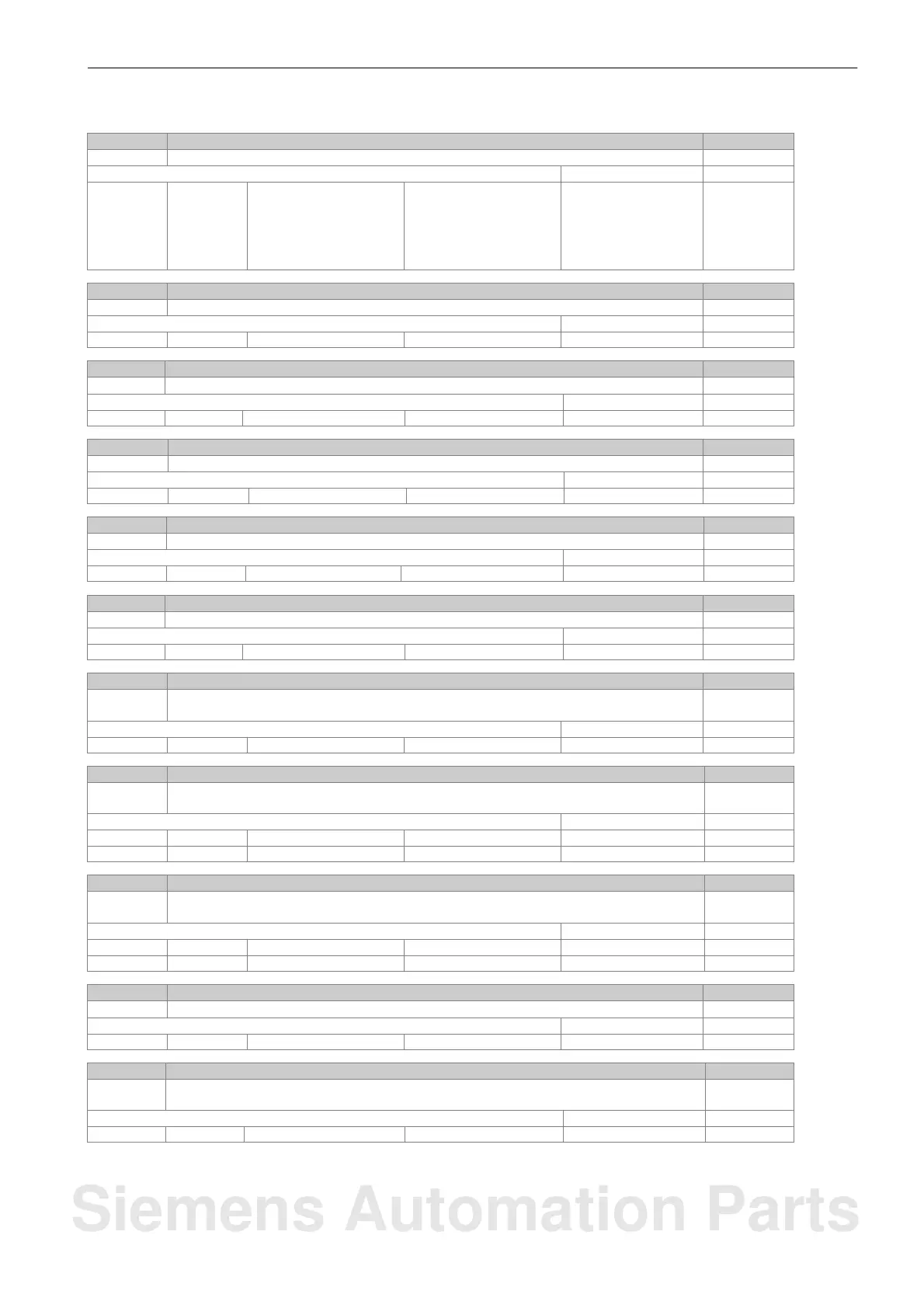
32200 POSCTRL_GAIN
1,000 r.p.m. Servo gain factor NEW CONF
–, – CTEQ DOUBLE
Default 6 16.66666667,
16.66666667,
16.66666667,
16.66666667,
16.66666667,
16.66666667
0 2000. 7/2
32210 POSCTRL_INTEGR_TIME
s Integral action time of the position controller NEW CONF
– – DOUBLE
Default – 1.0 0 10000.0 2/2
32220 POSCTRL_INTEGR_ENABLE
– Activation of the integral portion of the position controller POWER ON
– – BOOLEAN
Default – FALSE – – 2/2
32230 POSCTRL_CONFIG
– Configuration of the position controller structure POWER ON
– – BYTE
Default – 0 0 17 7/2
32300 MAX_AX_ACCEL
m/s@, rev/s@ Axis acceleration NEW CONF
–, – CTEQ DOUBLE
Default 1.0 1.0e–3 – 7/2
32420 JOG_AND_POS_JERK_ENABLE
– Enable axial jerk limitation RESET
– CTEQ BOOLEAN
Default – FALSE – – 2/2
32430 JOG_AND_POS_MAX_JERK
m/s#,
deg/s#
Axial jerk RESET
– CTEQ DOUBLE
Default – 1000.0 1.e–9 – 2/2
32431 MAX_AX_JERK
m/s#,
deg/s#
Maximum axial jerk when traveling along the path NEW CONF
– – DOUBLE
Default 1.e6 1.e–9 – 3/3
plus – 1000 – – 3/3
32432 PATH_TRANS_JERK_LIM
m/s#,
deg/s#
Max. axial jerk when traveling along the path with block transition NEW CONF
– CTEQ DOUBLE
Default 1.e6 – – 3/3
plus – 1.e3 – – /
32440 LOOKAH_FREQUENCY
– Smoothing frequency with LookAhead NEW CONF
EXP, – – DOUBLE
Default – 10. – – 2/2
32450 BACKLASH
mm,
degrees
Backlash on reversal NEW CONF
– – DOUBLE
Default 1 0.0, 0.0 – – 2/2
Siemens Automation Parts

 Loading...
Loading...








