430
1
2
M
3
○○
FNC
300
X Y M S
D.b R.b
KnX KnY
KnM KnS
T C
D,R
V,Z
UnG
K,H
E
" $"
S1
S2
D1
D2
D Z R N
S1 S 2
D1 D 2
DZRN K50000 K1000 Y0 Y4
M0
S1 S2
D1 D2
○ ○
S1 S 2
S1
S1 S1
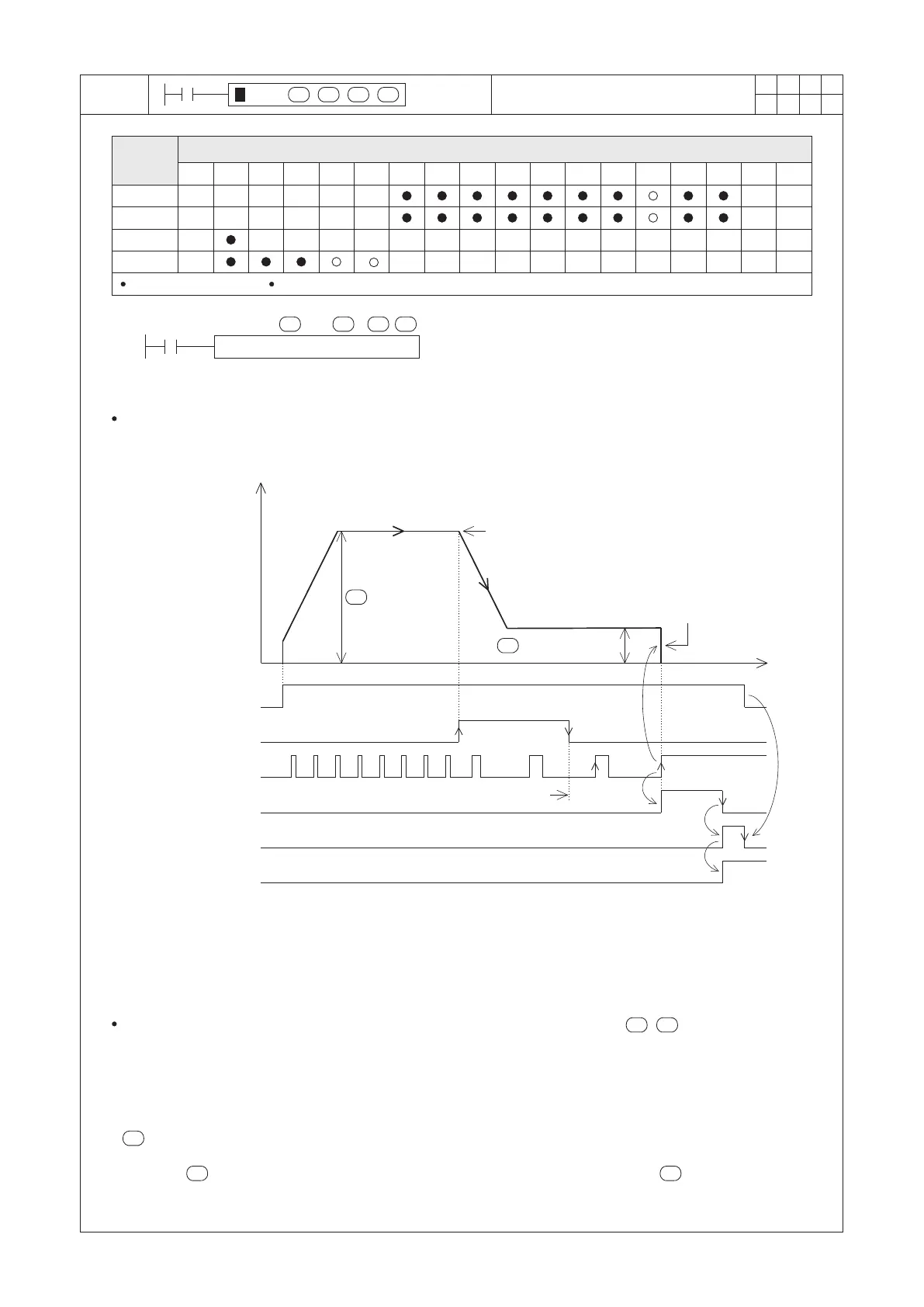
DOG Signal X10
PG0 Signal X0
CLR Signal Y10
M9344 Home positioning
complete ag
The DOG signal may use a X or M. Usually assigned to the X0~X7, because the interrupt
input point can have the instant response.
Should avoid the DOG's Rear End signal to be too close to the PG0's Front End signal, that
may cause the PG0 counting error.
For the PG0 signal input, must use X0~X7. The PLC processes the counting by the way of
interrupt.
The CLR signal output can assign to a Y or M, the width of that “ON” signal is ≥ 20ms.
1
2
Starts to count PG0 signals after DOG’s Rear End
is appeared. The set number of PG0 signals = 2.
S1
M0
Condition contact
M9342 Positioning
completed ag
Zero Return (Home positioning)
Operand
Devices
D1 = Y0~Y3
If the D2 is assigned to a Y, it must use Y0~Y7
S1 : the home positioning speed (by user unit)
S2 : the home positioning creep speed (by user unit)
D1 : the output point of generated pulse string
D2 : the output point of direction control signal
The executive mode of this zero return example is using the “DOG Rear End with PG0 count home positioning”
which is appointed by the “Positioning Parameter Setup” under the Ladder Master S. Also, The DOG signal is
assigned to X10, PG0 signal to X0 and CLR outputs by Y10.
S2
Home positioning
creep speed
When M0 = “ON”, the ZRN instruction starts to execute. With the assigned speeds , and following the
selected home return mode, to complete the home positioning action. Then the preset value of home position
(D9347, D9346) will be duplicated to the present value of Y0 axis (D9355, D9354).
The VS series PLC provides with 5 home return modes (DOG Rear End home positioning / DOG Front End home
positioning / DOG Rear End with PG0 count home positioning / DOG Front End with PG0 count home positioning
and Data-set type home return). For the details of their actions, please refer to the section 8-1-3 “Positioning
Operation Setup”.
is for to assign the operating speed of home positioning
The available range is from the bias speed (D9342) to the maximum speed (D9341, D9340).
When < the bias speed, it will be regarded as the bias speed. Oppositely, when > the maximum
speed, it will be regarded as the maximum speed.
Speed
Direction of home positioning
DOG Front End, start to slow down
Home positioning
speed
Time
Stop immediately when the PG0’s
counting set value is reached
 Loading...
Loading...