429
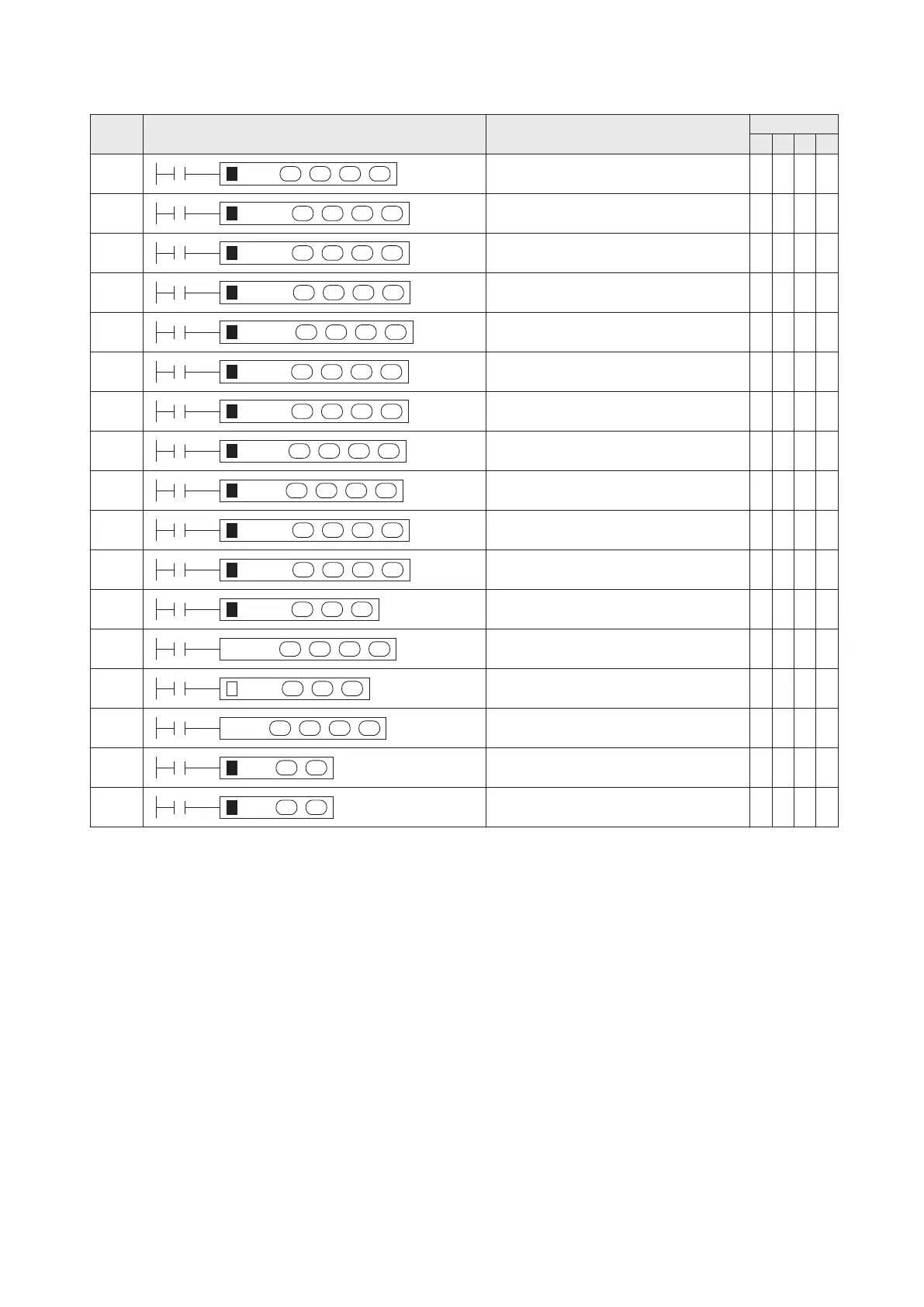
8-3 Positioning Control Instructions
○
○
○
○
○
○
○
○
308
309
310
314
D D V S R
D D V S A
D D V 2
I
S1
S2
D1 D 2
S1
S2
D1 D 2
S1
S2
D1 D 2
M P G
S1
S2
D1 D 2
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
313
300
301
302
311
307
315
316
312
D A B S
D L A
I
D P L S V
D D V T
I
S1
S2
D1 D 2
D L R
I
S
D
S
D
D1 D 2
S
D1 D 2
S
○
○
○
○
305
306
D D V 2 R
S1
S2
D1 D 2
D D V 2 A
S1
S2
D1 D 2
○
○
○
○
303
304
D D R V R
D D R V A
S1
S2
D1 D 2
S1
S2
D1 D 2
D J O G F
S1
S2
D1 D 2
D J O G R
S1
S2
D1 D 2
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
D Z R N
S1 S2
D1 D 2
D T B L
S1
S2
D1 D 2
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
Mnemonic in Ladder Chart
Function Description
Applicable VS
1
2
M
3
FNC
No.
Zero Return (Home positioning)
Jog Forward
Jog Reverse
Drive to Relative Position
Drive to Absolute Position
Drive to Relative Position by 2 Stages
Drive to Absolute Position by 2 Stages
Interrupt Constant Quantity Positioning
2 Stages Interrupt Constant
Quantity Positioning
Interrupt to Stop or Drive to
Relative Position
Interrupt to Stop or Drive to
Absolute Position
Variable Speed Pulse Output
Data Table Positioning
Absolute Current Value Read
Handwheel Positioning
Relative Linear Interpolation
Absolute Linear Interpolation