469
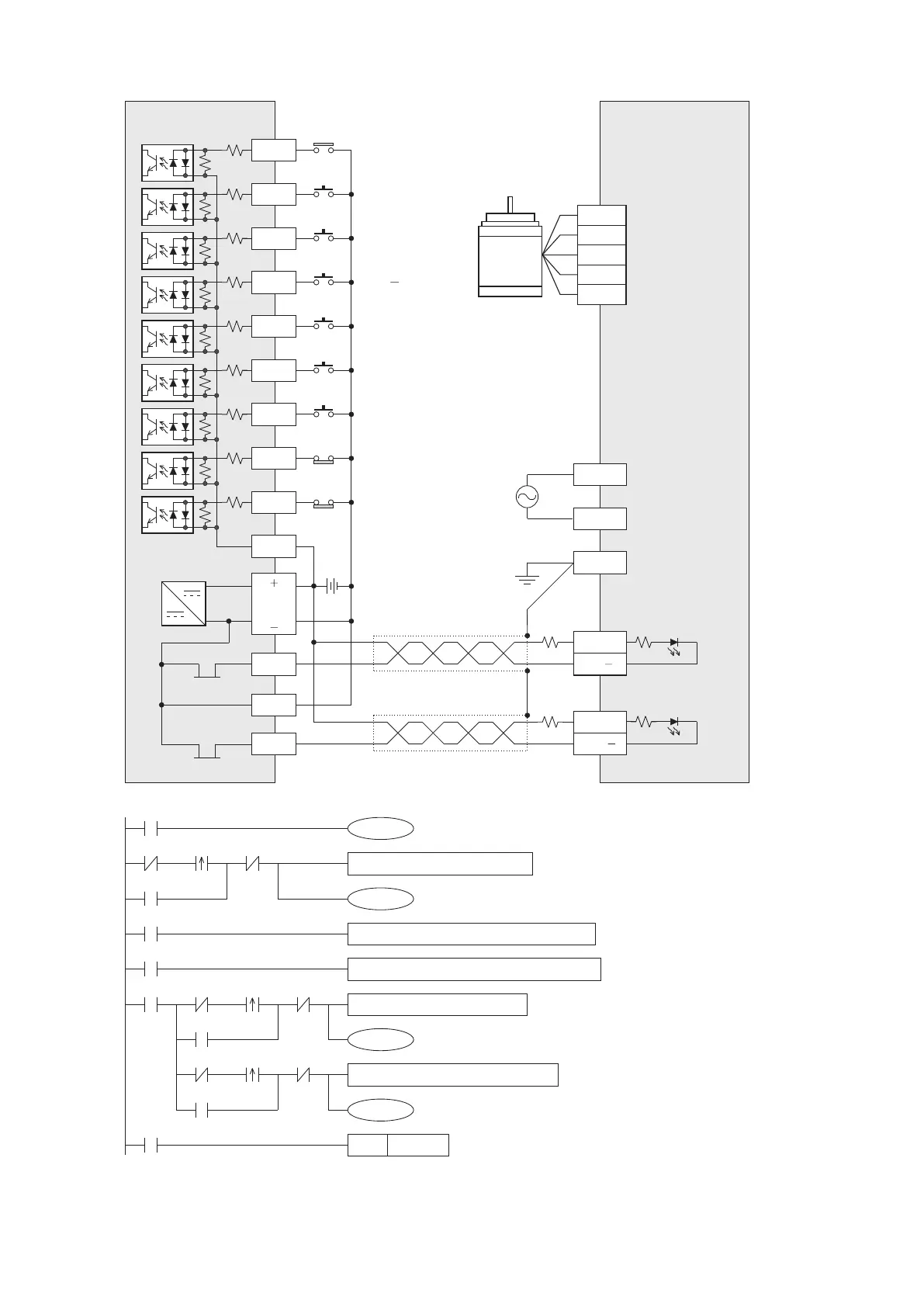
The wiring example between the VS1 transistor Main Unit and a stepper servo drive
X2
X16
X17
S/S
X14
X15
X12
X13
JOG+
VS1-32MT
X11
Near point signal
(DOG)
Y0
C0
Y1
24V
IN
24V DC
power
X10
JOG
CK+
CK
220Ω
AC110
AC110
FG
110V AC
power
2K
DIR+
DIR
220Ω
2K
M9342X10M9340
M0
X11
X12
M9343
M9344
M1
M2
DDRVA K0 K10000 Y0 Y1
SET
Y10
X15
M9342
M9342
X13
X14
M9340
M9340
ZRN K30000 K1000 Y0 Y1
DDRVR K2147483647 K10000 Y0 Y1
DDRVR K-2147483648 K10000 Y0 Y1
M9345
M1
M2
DDRVR K50000 K10000 Y0 Y1
Stepper motor drive
Home position return
Move back to
zero point
Single-speed positioning
Stop
Stepper motor
Forward limit
switch
Reverse limit
switch
Prevent the Y0 to generate the pulse string (by gradually slow down)
The Home Position Return function
The Home Position Return function is operating (self holding contact)
The JOG+ action
The JOG– action
The function to move back to the zero point
(= home position when the D9346 = 0)
The function to move back to the zero point is operating
(self holding contact)
The function of single-speed positioning
The function of single-speed positioning is operating
(self holding contact)
The positioning function has been stopped abnormally
M0