Operation
7722−1/A1
Winterthur Gas & Diesel Ltd.
3/ 5
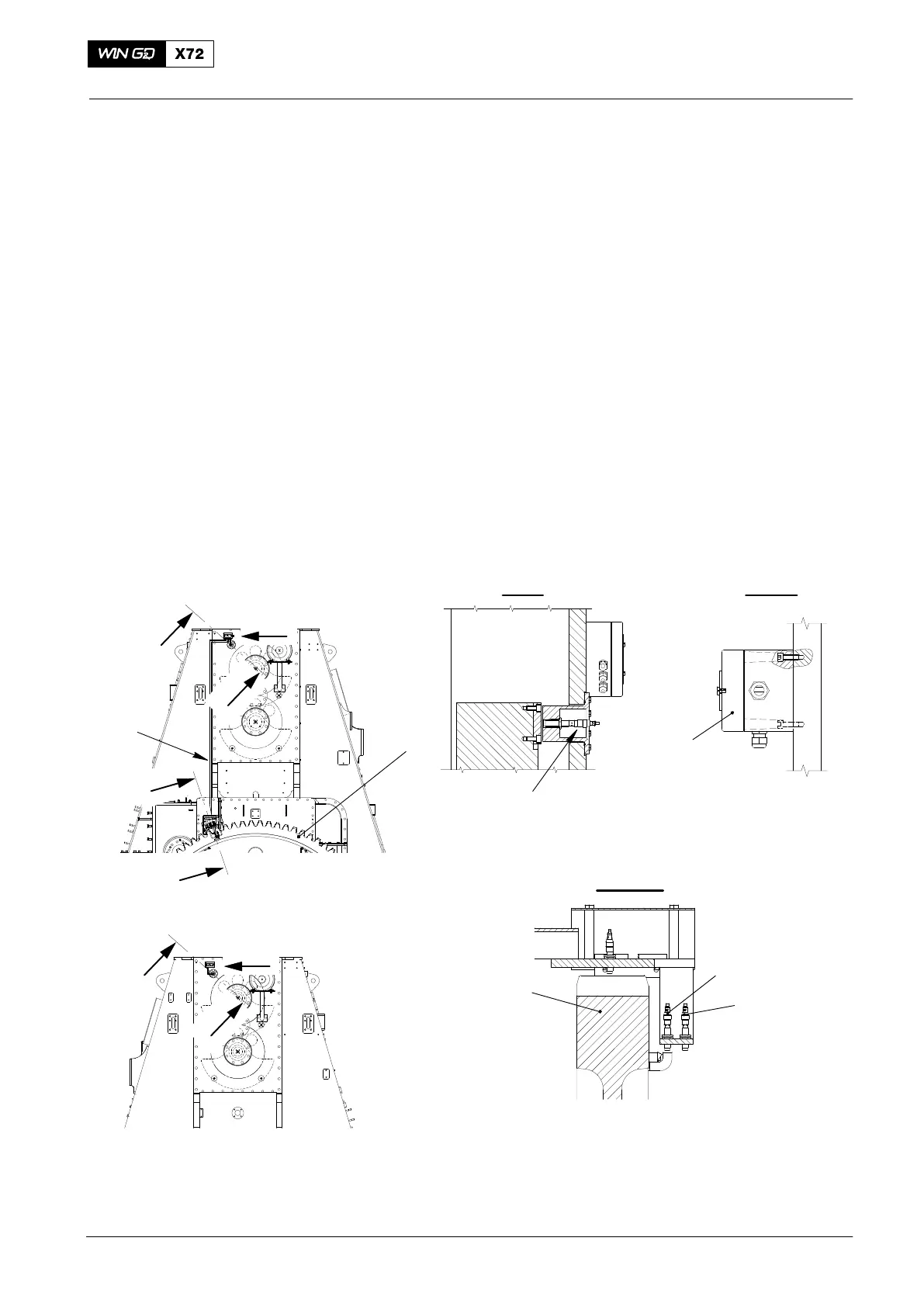
2.2 Control System
The control system has the functions that follow:
D At the driving end, the proximity sensor ZS5401C senses the tooth movement of
the balance weight. The signals are then transmitted through the terminal
box38.1(2, Fig. 3) to the control unit.
D At the free end, the proximity sensor ZS5405C senses the tooth movement of the
balance weight. The signals are then transmitted through the terminal
box38.1 (2) to the control unit.
D The proximity sensors (ZS5141C and ZS5142C) transmit the speed of the
flywheel (1) and the TDC position along the cables (3) to the terminal
box 38.1 (2) at the driving end. These signals then go to the control unit.
Attached to the electric motor is a resolver, which sends the motor speed to the
control system.
Control of the ELBA is automatic. The ELBA activates when the engine speed is more
than 60 rpm. When the engine speed decreases to less than 50 rpm, the ELBA
de-activates.
A manual operation mode can also be selected. On the door of the electrical cabinet,
a mode switch has the label Heavy Sea Mode. When selected, the ELBA operates at
different higher engine speeds. Also, the engine RPM is not in the given limits.
I
DRIVING END
I
I - I
II
II - II
2
Turned through 45°
I
II
I
FREE END
1
III
III
Turned through 20°
III - III
3
1
ZS5401C - Driving End
ZS5405C - Free End
WCH03085
WCH03085
ZS5141C
ZS5142C
Fig. 3: Control System
1 Flywheel 3 Cable
2 Terminal box 38.1
2015-12
Integrated Electric Balancer