6.13 Absolute Linear Encoders
6.13.7 Alarm Output from the Output Ports for the Position Data from the Absolute Linear Encoder
6-95
Note: The above formulas also apply in reverse movement mode (Pn000 = n.1).
6.13.7
Alarm Output from the Output Ports for the Position
Data from the Absolute Linear Encoder
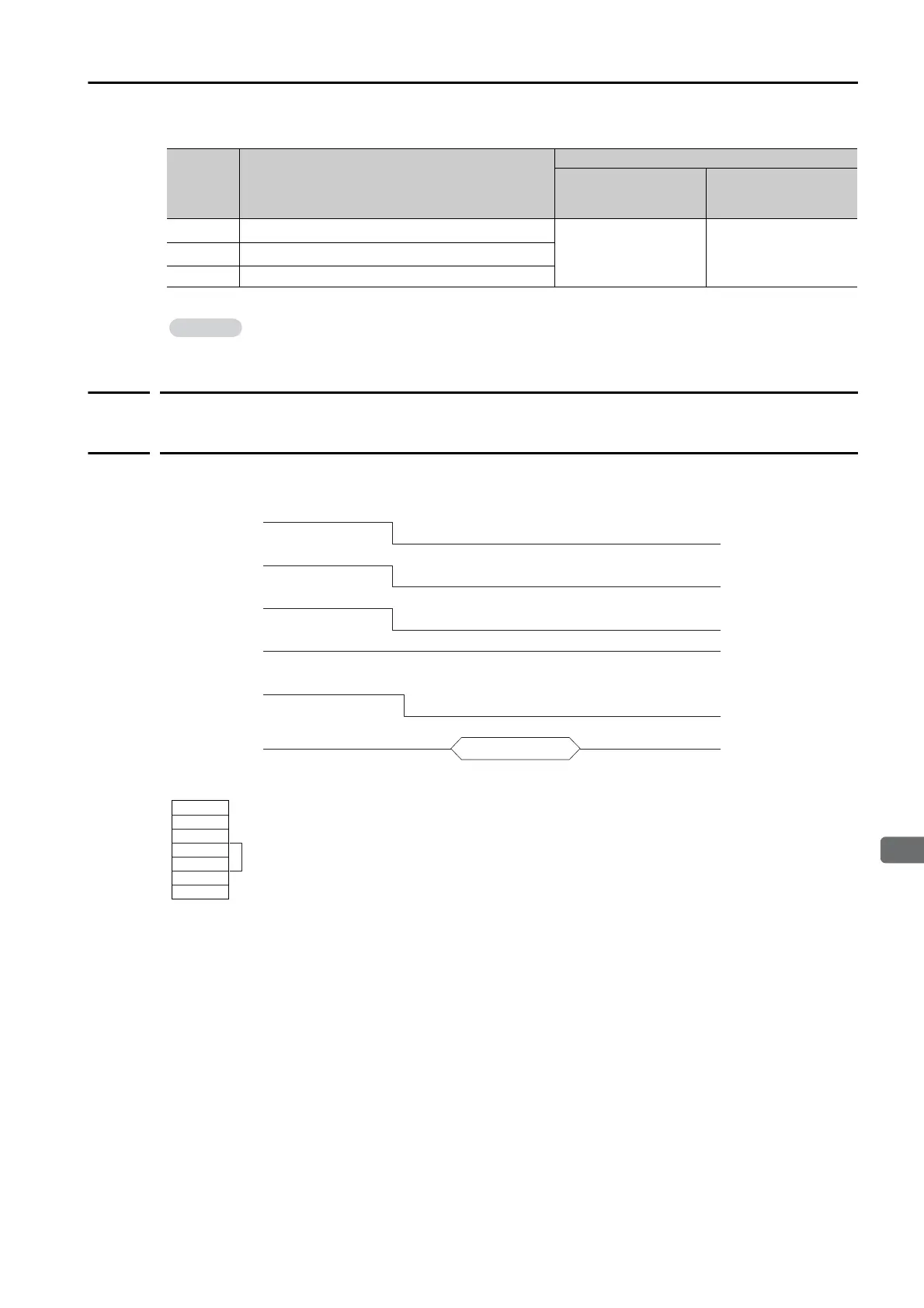
Any alarm detected by the SERVOPACK is transmitted as the upper 16-bit data (with sign) to the host
controller with the PAO (Encoder Divided Pulse Output) signal when the SEN (Absolute Data Request)
turns OFF.
The data format of the alarm information is shown below.
P
S
’
Lower 20 bits of the position data of the origin
Encoder Output Resolu-
tion (Pn281)
Encoder pulses
P
M
Current position in machine coordinate system
R 1048576 (=220)
If you are using a Linear Servomotor, you do not need to reset the absolute linear encoder to
define the origin. (Some absolute linear encoders also allow you to set any position as the origin.)
Continued from previous page.
Symbol Meaning
Setting or Unit
Encoder Divided Pulse
Output (PAO and PBO)
Signals
Absolute Encoder
Position Output (PSO)
Signal
ALM signal
Motor power
status
Main circuit
power supply
Control power
supply
SEN signal
PAO signal
Servo ON
(Power supplied.)
Servo OFF (Power not supplied.)
ON OFF
ON
Alarm information
ON OFF
A
L
M
0 to 9
0 to 9
.
CR
Upper two digits
of alarm code

 Loading...
Loading...



