10.3 Parameter Settings for Fully-Closed Loop Control
10.3.2 Setting the Motor Direction and the Machine Movement Direction
10-6
10.3.2
Setting the Motor Direction and the Machine Movement
Direction
You must set the motor direction and the machine movement direction. To perform fully-closed
loop control, you must set the motor rotation direction with both Pn000 = n.X (Direction
Selection) and Pn002 = n.X (External Encoder Usage).
• Phase B leads in the divided pulses for a forward reference regardless of the setting of Pn000
= n.X.
• Forward direction: The direction in which the pulses are counted up.
• Reverse direction: The direction in which the pulses are counted down.
Related Parameters
Pn000 = n.X
Refer to the following section for details.
5.6 Motor Direction Setting on page 5-18
Pn002 = n.X
When you perform fully-closed loop control, set Pn002 to n.1 or n.3.
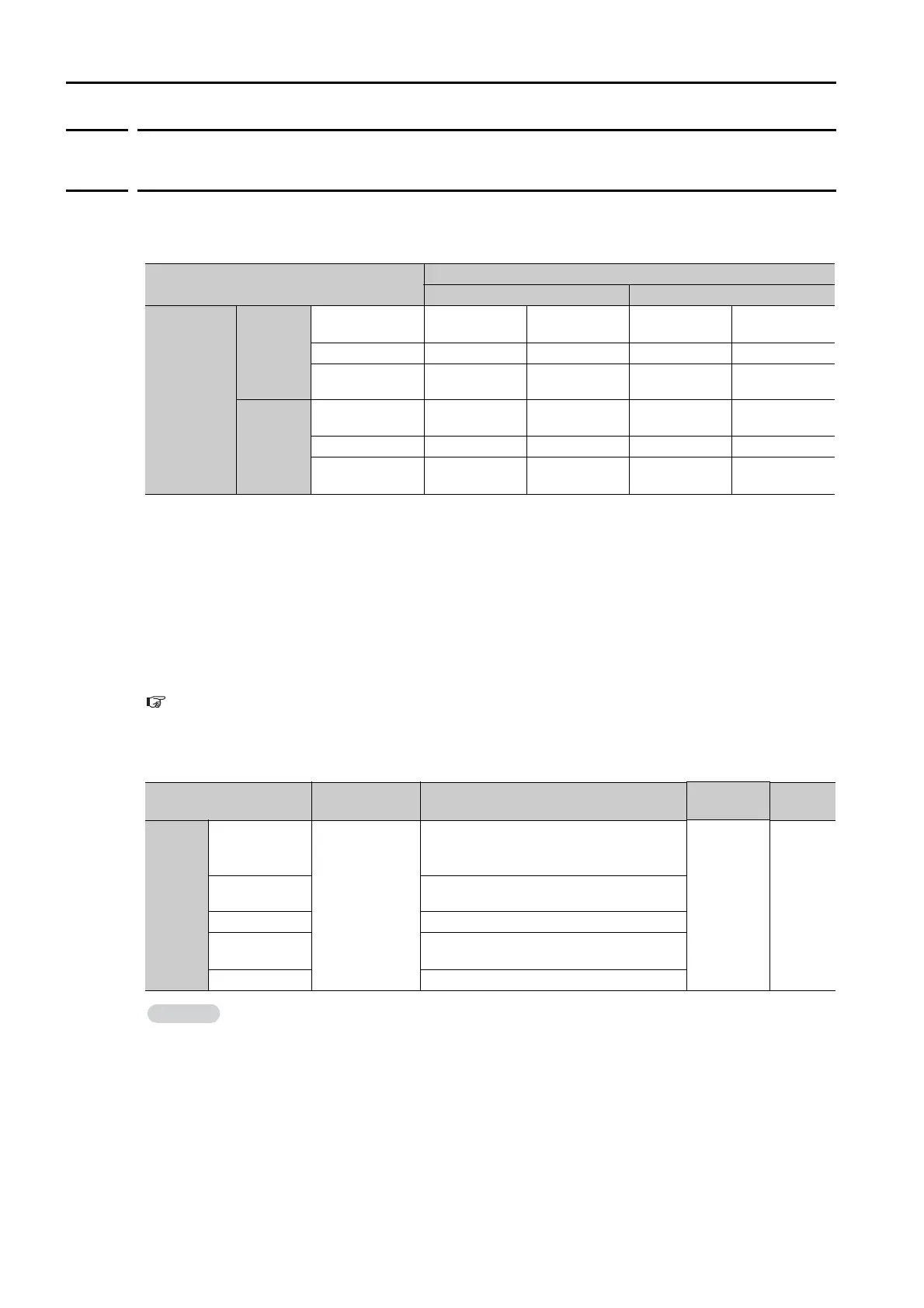
Parameter
Pn002 = n.X (External Encoder Usage)
n.1 n.3
Pn000
=n.X
(Direction
Selection)
n.0
Reference
direction
Forward
reference
Reverse
reference
Forward
reference
Reverse
reference
Motor direction CCW CW CCW CW
External
encoder
Forward
movement
Reverse
movement
Reverse
movement
Forward
movement
n.1
Reference
direction
Forward
reference
Reverse
reference
Forward
reference
Reverse
reference
Motor direction CW CCW CW CCW
External
encoder
Reverse
movement
Forward
movement
Forward
movement
Reverse
movement
Parameter Name Meaning
When
Enabled
Classifi-
cation
Pn002
n.0
(default set-
ting)
External
Encoder Usage
Do not use an external encoder.
After restart Setup
n.1
External encoder moves in forward
direction for CCW motor rotation.
n.2
Reserved setting (Do not use.)
n.3
External encoder moves in reverse direc-
tion for CCW motor rotation.
n.4
Reserved setting (Do not use.)
Determine the setting of Pn002 = n.X as described below.
• Set Pn000 to n.0 (Use the direction in which the linear encoder counts up as the for-
ward direction) and set Pn002 to n.1 (The external encoder moves in the forward
direction for CCW motor rotation).
• Manually rotate the motor shaft counterclockwise.
• If the fully-closed feedback pulse counter counts up, do not change the setting of Pn002
(Pn002 = n.1).
• If the fully-closed feedback pulse counter counts down, set Pn002 to n.3.

 Loading...
Loading...



