6.7 Torque Control
6.7.2 Adjusting the Torque Reference Offset
6-41
Note: You can input a torque reference that exceeds the rated torque, but A.710 (Instantaneous Overload) or A.720
(Continuous Overload) alarms may occur if the reference is maintained for a long time or the motor outputs a
torque that exceeds the rated torque. Refer to the following section for details.
12.2.2 Troubleshooting Alarms on page 12-12
6.7.2
Adjusting the Torque Reference Offset
With torque control, the Servomotor may sometimes operate at a very low speed for a torque
reference of 0 V. This occurs because the internal reference in the SERVOPACK has a slight off-
set of a few millivolts.
If the Servomotor moves at a very low speed, the offset needs to be eliminated by adjusting the
offset.
You can adjust the torque reference offset either automatically or manually.
Automatically Adjusting the Torque Reference Offset
To automatically adjust the torque reference offset, the amount of offset is measured and the
torque reference voltage is adjusted automatically.
The measured offset is saved in the SERVOPACK.
Preparations
The following conditions must be met to automatically adjust the reference offset.
• The parameters must not be write prohibited.
• The servo must be OFF.
• There must not be a position loop or speed loop in the host controller.
300
200
100
-300
-200
-100
1 3 10 12
0
-3-10-12
Output torque (%)
Default Setting
(Rated torque)
Torque reference voltage (V)
Setting range
(1.0 V to 10.0 V)
Input voltage range (0 V to 12 V)
The offset does not use a parameter, so it will not change even if the parameter settings are
initialized.
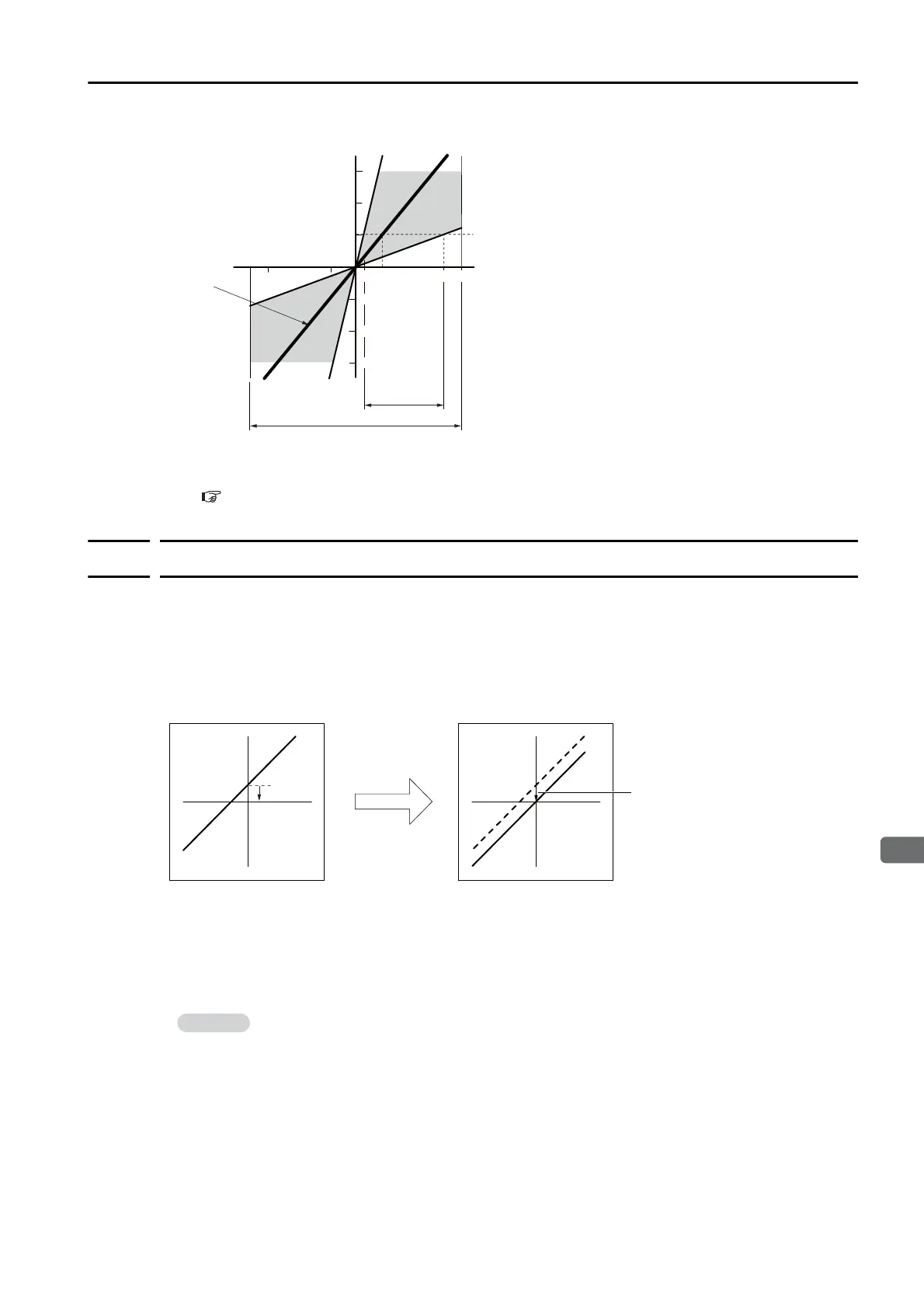
Output torque
Offset
Torque
reference
voltage
Offset adjustment
Output torque
Torque
reference
voltage
The offset is adjusted in the SERVOPACK.
Offset adjustment range: −127 to +127
(Torque reference: −1,905 mV to 1,905 mV,
Offset setting unit: 15.0 mV)

 Loading...
Loading...



