6.12 Absolute Encoders
6.12.3 Output Ports for the Position Data from the Absolute Encoder
6-75
6.12.3
Output Ports for the Position Data from the Absolute
Encoder
You can read the position data of the absolute encoder from the PAO, PBO, and PCO (Encoder
Divided Pulse Output) signals and the PSO (Absolute Encoder Position Output) signal.
The output method and timing for the position data of the absolute encoder are different in each case.
Encoder Divided Pulse Output Port
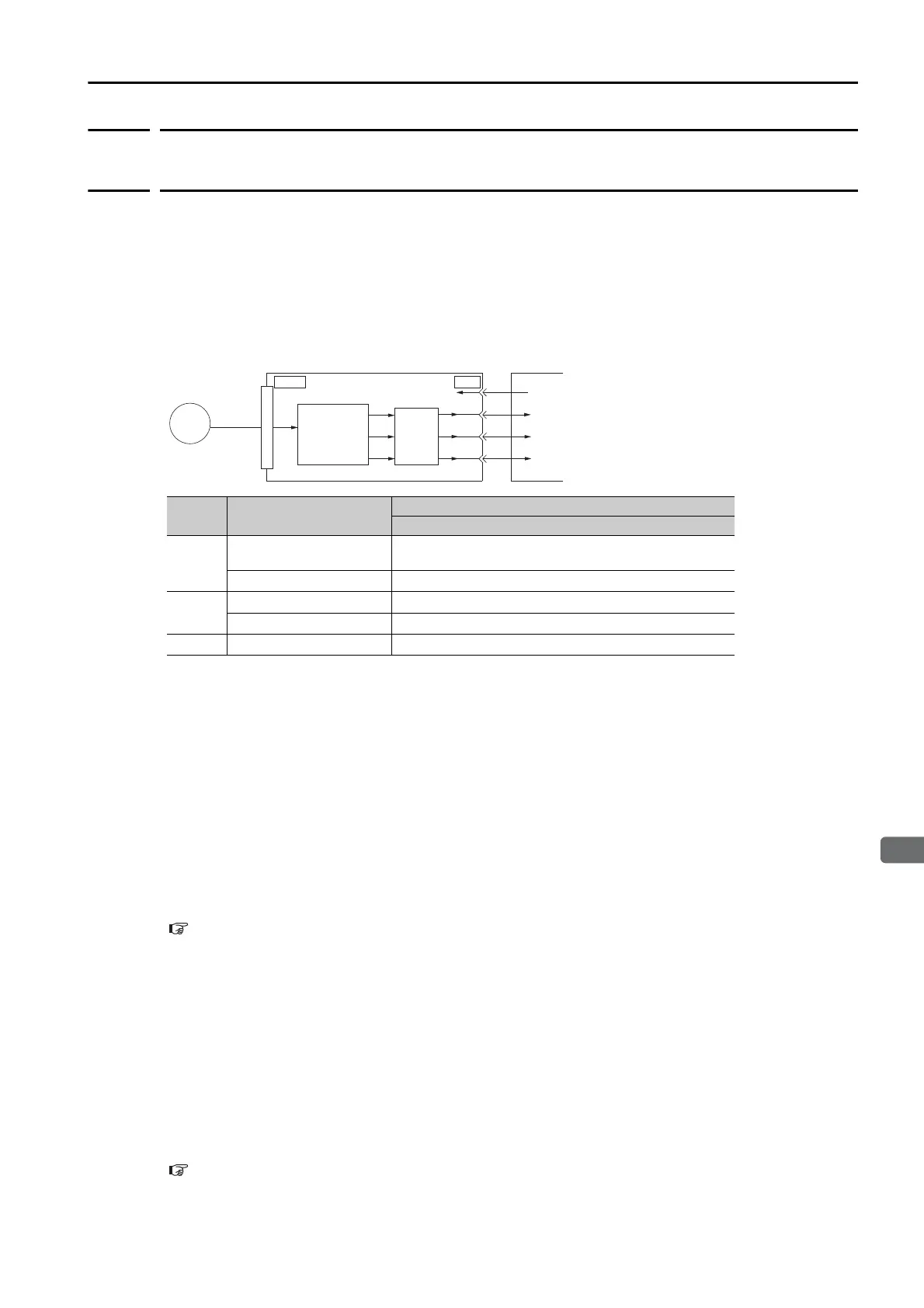
A conceptual diagram of the connections of the PAO, PBO, and PCO (Encoder Divided Pulse Output)
signals to the host controller is provided below.
The PAO (Encoder Divided Pulse Output) signal outputs the position data from the absolute encoder
after the control power supply is turned ON. There are two methods that you can use to output the
position data from the absolute encoder: Using the SEN (Absolute Data Request) signal and not using
the SEN signal.
The position data of the absolute encoder is the current stop position. The absolute encoder outputs
the multiturn data with the specified protocol. The absolute encoder outputs the position within one
rotation as a pulse train. It then outputs pulses as an incremental encoder (incremental operation sta-
tus).
The host controller must have a reception circuit (e.g., UART) for the position data from the absolute
encoder. The pulse counter at the host controller will not count pulses when the multiturn data (com-
munications message) is input because only phase A is input. Counting starts from the position of the
absolute encoder within one rotation.
The output circuits for the PAO, PBO, and PCO signals use line drivers. Refer to the following section
for details on line drivers.
4.5.4
I/O Circuits
on page 4-43
PSO (Absolute Encoder Position Output) Port
The PSO (Absolute Encoder Position Output) signal periodically outputs the position data from the
absolute encoder according to the specified protocol after outputting the position data from the
absolute encoder with the PAO and PBO signals has been completed. There are two methods that you
can use to output the position data from the absolute encoder: Using the SEN (Absolute Data Request)
signal and not using the SEN signal.
The host controller must have a reception circuit (e.g., UART) for the position data from the absolute
encoder.
The output circuit for the PSO signal uses a line driver. Refer to the following section for details on line
drivers.
4.5.4
I/O Circuits
on page 4-43
Signal Status
Signal Contents
When Using an Absolute Encoder
PAO
First signal Multiturn data position within one rotation (pulse train)
During normal operation Incremental pulses
PBO
First signal Position within one rotation (pulse train)
During normal operation Incremental pulses
PCO Always Origin pulse
Serial
data
ENC
CN1
Host controller
SERVOPACK
SEN
PAO
PBO
PCO
CN2
Conversion of
serial data to
pulses
Dividing
circuit
(Pn212)

 Loading...
Loading...



