7.4 Trial Operation from the Host Controller for the Servomotor without a Load
7.4.2 Trial Operation for Speed Control
7
Trial Operation and Actual Operation
7-13
9.
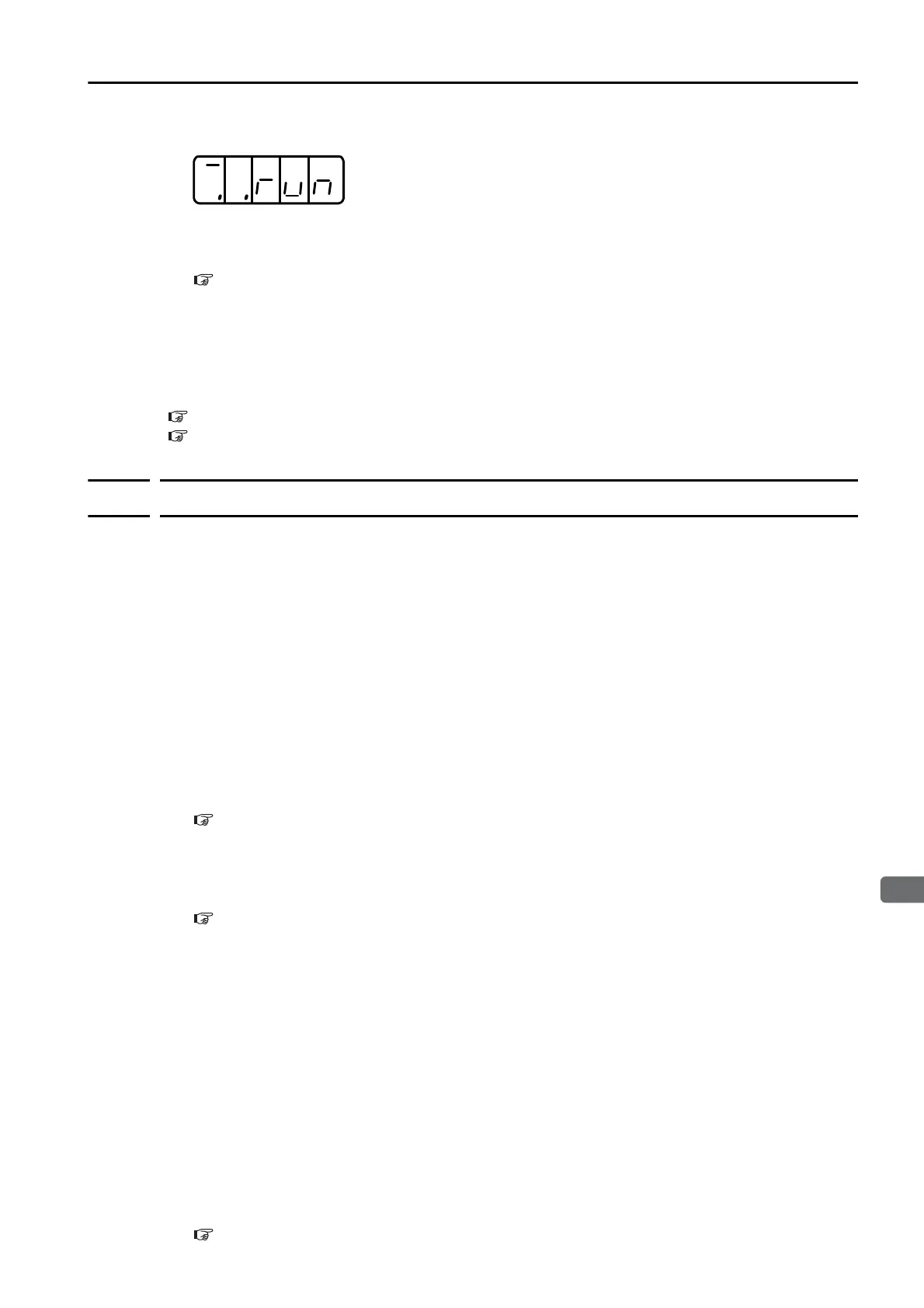
Confirm that the Panel Operator display is as shown below.
If the above display appears, power is being supplied to the Servomotor and the servo is ON.
If an alarm is displayed, the servo is OFF and power is not being supplied to the Servomotor. Refer to
the following section, clear the alarm, and repeat the procedure from step 4.
12.2.3 Resetting Alarms on page 12-42
10.
If you changed the settings of Pn50A or Pn50B in step 2, return the settings to their
original values.
This concludes the procedure to prepare the Servomotor for trial operation.
Proceed to one of the following sections according to the control method.
7.4.2 Trial Operation for Speed Control on page 7-13
7.4.4 Trial Operation for Position Control on page 7-15
7.4.2
Trial Operation for Speed Control
This section describes trial operation with speed control.
Preparations
Always confirm the following before you perform the procedure for trial operation with speed
control.
• Make sure that the procedure to prepare the Servomotor for trial operation described in 7.4.1
Preparing the Servomotor for Trial Operation on page 7-11 has been completed.
Operating Procedure
1.
Adjust the speed reference input gain (Pn300).
The default setting of Pn300 is for the rated speed at 6 V. If you want to use this setting, do not adjust
Pn300 and proceed to the next step.
To change the setting of Pn300, refer to the following section.
6.5 Speed Control on page 6-17
2.
Set the speed reference (V-REF, SG voltage) to 0 V from the host controller and check
the rotation of the Servomotor shaft.
If the Servomotor shaft is rotating slightly, refer to the following section and adjust the reference offset
so that the shaft does not rotate.
Adjusting the Speed Reference Offset on page 6-19
3.
Input a low-speed, constant-speed reference from the host controller to operate the
Servomotor and visually check the motor speed.
• Rotary Servomotor example: For a speed reference of 60 min
-1
, the shaft should rotate at 1 rotation
per second.
• Linear Servomotor example: For a speed reference of 60 mm/s, the Moving Coil should move at 60
mm/s.
4.
Gradually increase the speed reference input from the host controller starting from 0 V.
5.
Confirm that the motor speed agrees with the speed reference value.
• Using the SigmaWin+: Monitor - Monitor - Status Monitor and Monitor - Monitor - Motion
Monitor
• Using the Panel Operator or Digital Operator: Un001 (Speed Reference Monitor) and Un000 (Motor
Speed Monitor)
6.
Confirm that the motor is operating in the correct direction.
If the motor direction is not correct, refer to the following section and change the motor direction.
5.6 Motor Direction Setting on page 5-18

 Loading...
Loading...



