6.7 Torque Control
6.7.3 Torque Reference Filter Settings
6-45
6.7.3
Torque Reference Filter Settings
The torque reference filter is a first order lag filter that is applied to the T-REF (Torque Reference
Input) signal. The torque reference input filter is set in Pn415 (T-REF Filter Time Constant).
If the setting is too high, the response to the torque reference may be slowed down. Monitor
the response as you set this parameter.
6.7.4
Speed Limit during Torque Control
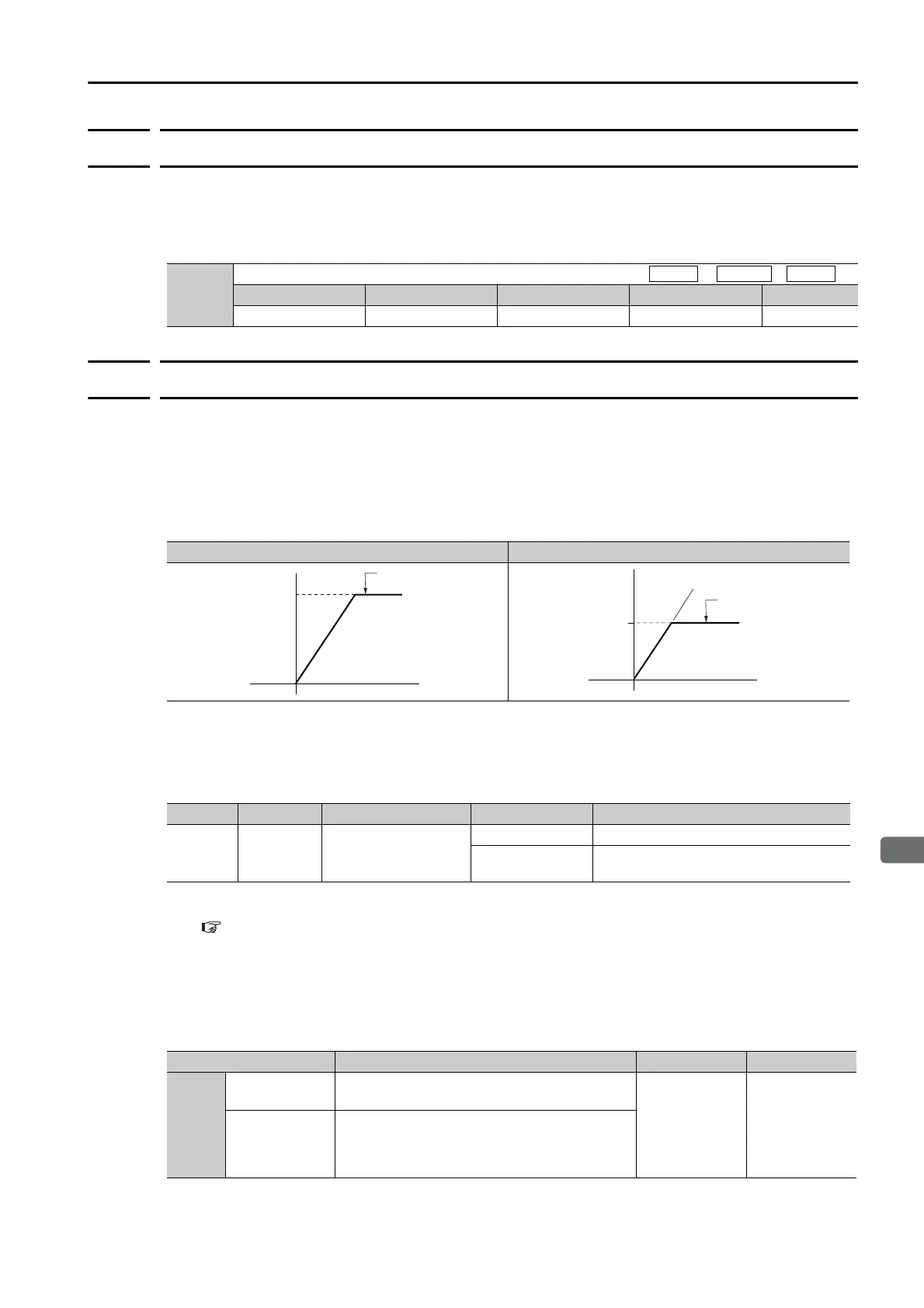
You can limit the speed of the Servomotor to protect the machine.
When you use a Servomotor for torque control, the Servomotor is controlled to output the
specified torque, but the motor speed is not controlled. Therefore, if a reference torque is input
that is larger than the machine torque, the speed of the Servomotor may increase greatly. If that
may occur, use this function to limit the speed.
Note: The actual limit of motor speed depends on the load conditions on the Servomotor.
/VLT (Speed Limit Detection) Signal
The signal that is output when the motor speed is being limited by the speed limit is described
in the following table.
Note: You must allocate the /VLT signal to use it. Use Pn50F = n.X (/VLT (Speed Limit Detection) Signal Allo-
cation) to allocate the signal to a connector pin. Refer to the following section for details.
6.1.2 Output Signal Allocations on page 6-8
Selecting the Speed Limit
You set the speed limit to use in Pn002 = n.X (Torque Control Option). If you set Pn.002
to n.1 (Use V-REF as an external speed limit input), the smaller of the external speed limit
and the internal speed limit will be used.
Note: If you are using a Rotary Servomotor, set Pn407 (Speed Limit during Torque Control). If you are using a Linear
Servomotor, set Pn480 (Speed Limit during Force Control).
Pn415
T-REF Filter Time Constant
Setting Range Setting Unit Default Setting When Enabled Classification
0 to 65,535 0.01 ms 0 Immediately Setup
With No Speed Limit With a Speed Limit
Typ e Signal Connector Pin No. Signal Status Meaning
Output /VLT Must be allocated.
ON (closed) The Servomotor speed is being limited.
OFF (open)
The Servomotor speed is not being lim-
ited.
Parameter Meaning When Enabled Classification
Pn002
n.0
(default setting)
Use Pn407 or Pn480 as the speed limit. (Use
internal speed limiting.)
After restart Setup
n.
1
Use V-REF (CN1-5 and CN1-6) as an external
speed limit input signal and limit the speed
with the V-REF input voltage and the setting of
Pn300. (Use external speed limiting.)
Speed
Maximum speed
Danger of damage due
to hazardous speed.
Time
Speed
Safe operation
with speed limit.
Time
Speed limit

 Loading...
Loading...



