6.7 Torque Control
6.7.2 Adjusting the Torque Reference Offset
6-44
Operating Procedure
Use the following procedure to manually adjust the torque reference offset.
1.
Input a 0-V reference voltage from the host controller or an external circuit.
2.
Click the Servo Drive Button in the workspace of the Main Window of the SigmaWin+.
3.
Select Adjust the Speed and Torque Reference Offset in the Menu Dialog Box.
The Adjust the Speed and Torque Reference Offset Dialog Box will be displayed.
4.
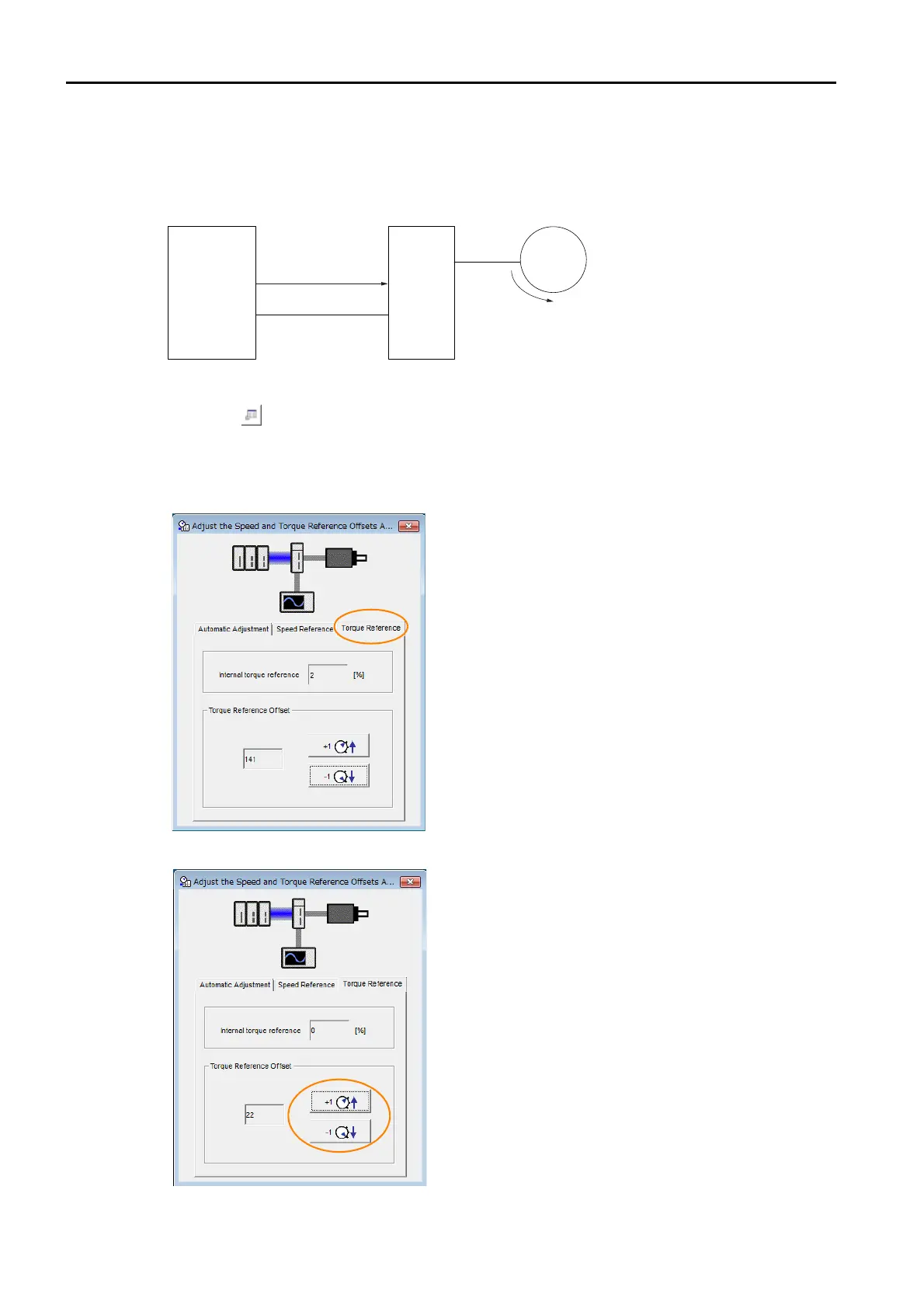
Click the Torque Reference Tab.
5.
Use the +1 and -1 Buttons to adjust the value in the Torque Reference Box to 0.
This concludes the procedure to manually adjust the torque reference offset.
Host controller
0-V speed reference or
0-V torque reference
Servo OFF
SERVOPACK
Servomotor
Slight rotation
(when servo is ON)

 Loading...
Loading...



