6.7 Torque Control
6.7.2 Adjusting the Torque Reference Offset
6-43
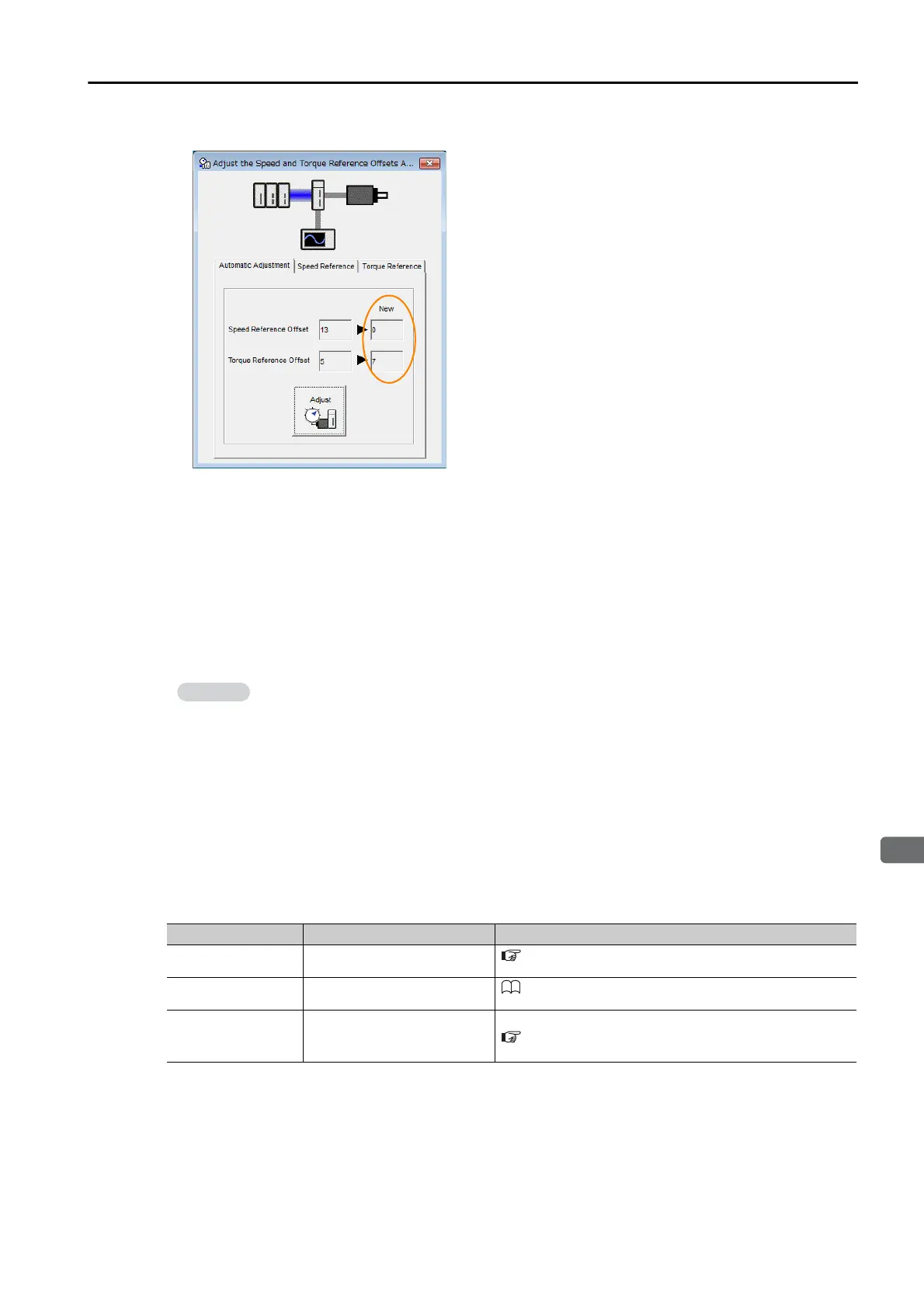
The value that results from automatic adjustment will be displayed in the New Box.
Note: You cannot automatically adjust the reference offset if a position loop is created with the host controller. Man-
ually adjust the torque reference offset.
This concludes the procedure to automatically adjust the torque reference offset.
Manually Adjusting the Torque Reference Offset
You can directly input a torque reference offset to adjust the torque reference. The offset is
adjusted manually in the following cases.
• To intentionally set the offset to a desired value
• To check an offset that was set automatically
Preparations
The following conditions must be met to manually adjust the reference offset.
• The parameters must not be write prohibited.
• The servo must be in ready status.
Applicable Tools
The following table lists the tools that you can use to manually adjust the torque reference off-
set and the applicable tool functions.
The offset does not use a parameter, so it will not change even if the parameter settings are
initialized.
Tool Function Operating Procedure Reference
Panel Operator Fn009
13.4.10 Manually Adjust Torque Reference Offset
(Fn00B) on page 13-19
Digital Operator Fn009
Σ-7-Series Digital Operator Operating Manual (Manual
No.: SIEP S800001 33)
SigmaWin+
Setup
−
Speed/Torque
Reference Offset Adjust-
ment
Operating Procedure on page 6-44

 Loading...
Loading...



