14.4 Troubleshooting Based on the Operation and Conditions of the Servomotor
14-57
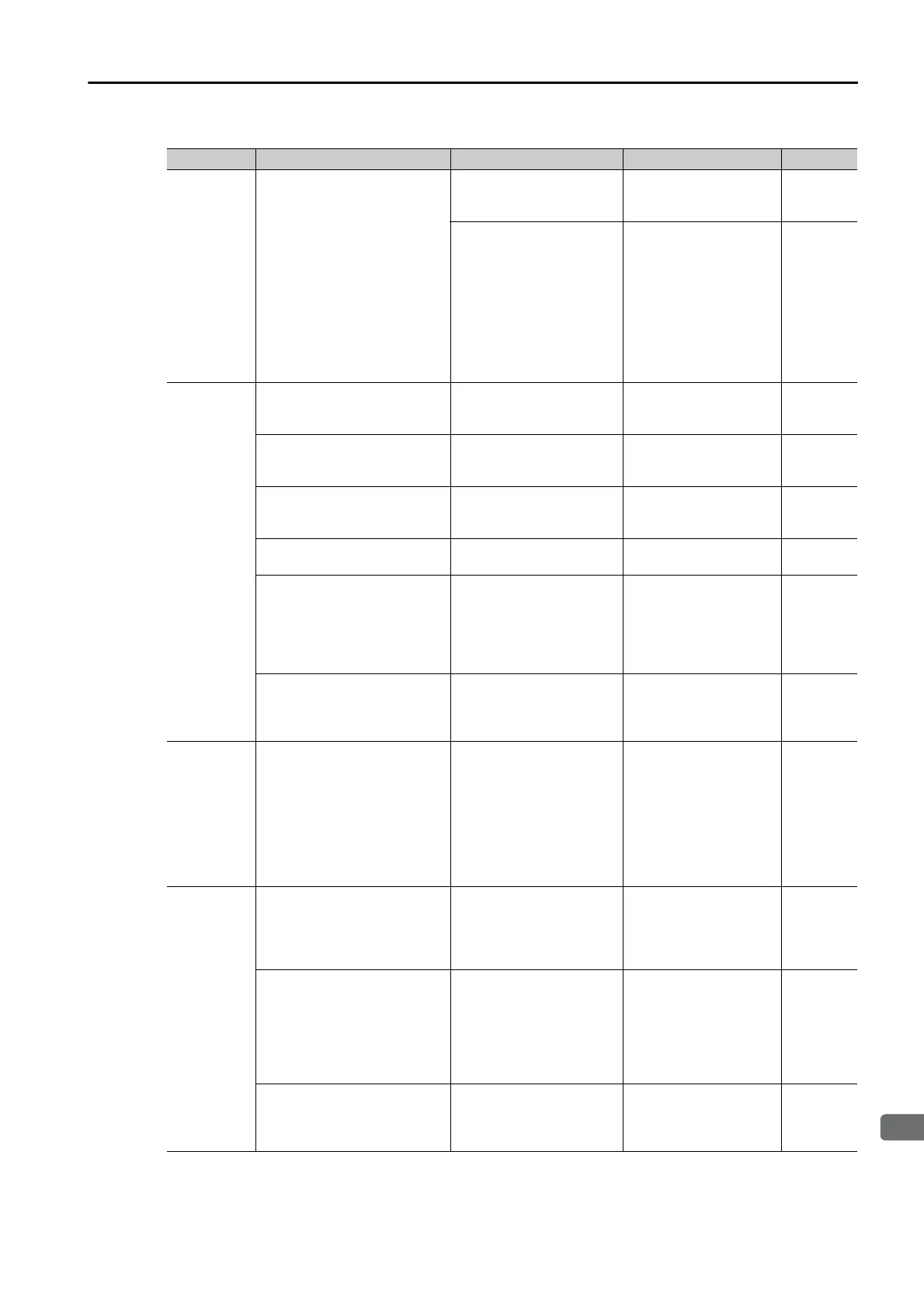
Servomotor
Does Not
Start
The polarity detection was
not executed.
Check the setting of
Pn080 =n.X (Polar-
ity Sensor Selection).
Correct the parameter
setting.
page 5-24
Check the Servo ON
command input.
• If you are using an
incremental linear
encoder, send the
Servo ON command
from the host control-
ler.
• If you are using an
absolute linear
encoder, execute
polarity detection.
page 5-25
Servomotor
Moves
Instanta-
neously,
and Then
Stops
There is a mistake in the Ser-
vomotor wiring.
Turn OFF the power sup-
ply to the servo system.
Check the wiring.
Wire the Servomotor
correctly.
−
There is a mistake in the wir-
ing of the encoder or Serial
Converter Unit.
Turn OFF the power sup-
ply to the servo system.
Check the wiring.
Wire the Serial Con-
verter Unit correctly.
−
There is a mistake in the lin-
ear encoder wiring.
Turn OFF the power sup-
ply to the servo system.
Check the wiring.
Wire the cable cor-
rectly.
−
The setting of Pn282 (Linear
Encoder Pitch) is not correct.
Check the setting of
Pn282.
Correct the setting of
Pn282.
page 5-17
The count-up direction of the
linear encoder does not
match the forward direction
of the Moving Coil in the
motor.
Check the directions.
Change the setting of
Pn080 = n.X
(Motor Phase Selec-
tion). Place the linear
encoder and motor in
the same direction.
page 5-22
Polarity detection was not
performed correctly.
Check to see if electrical
angle 2 (electrical angle
from polarity origin) at any
position is between ±10°.
Correct the settings for
the polarity detection-
related parameters.
−
Servomotor
Speed Is
Unstable
There is a faulty connection
in the Servomotor wiring.
The connector connec-
tions for the power line
(U, V, and W phases) and
the encoder or Serial
Converter Unit may be
unstable.
Turn OFF the power sup-
ply to the servo system.
Check the wiring.
Tighten any loose ter-
minals or connectors
and correct the wiring.
−
Servomotor
Moves with-
out a Refer-
ence Input
A failure occurred in the SER-
VOPACK.
−
Turn OFF the power
supply to the servo
system.
Replace the SERVO-
PACK.
−
The count-up direction of the
linear encoder does not
match the forward direction
of the Moving Coil in the
motor.
Check the directions.
Change the setting of
Pn080 = n.X
(Motor Phase Selec-
tion).
Match the linear
encoder direction and
Servomotor direction.
page 5-22
Polarity detection was not
performed correctly.
Check to see if electrical
angle 2 (electrical angle
from polarity origin) at any
position is between ±10°.
Correct the settings for
the polarity detection-
related parameters.
−
Continued on next page.
Continued from previous page.
Problem Possible Cause Confirmation Correction Reference
 Loading...
Loading...




