Speed-controlled master
Torque-or-speed
controlled follower
Process master
Process
follower
Master
DDCS
(For example)
Control word
Speed reference
Torque reference
Master/follower link
(For example)
Status word
01.01, 01.10
Fieldbus control
External control system
(e.g. PLC)
DDCS
Follower
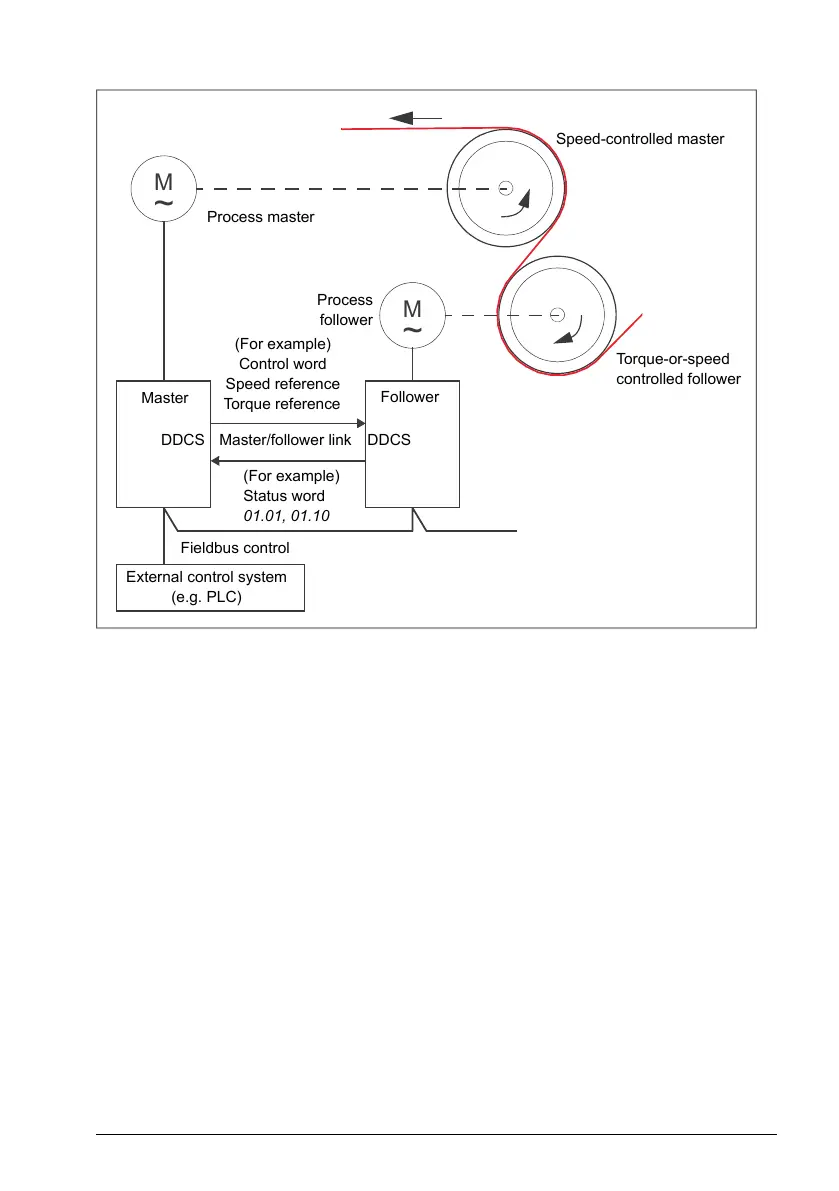
The master drive is typically speed-controlled and the other drives follow its torque or
speed reference. In general, a follower should be
• torque-controlled when the motor shafts of the master and the follower are rigidly
coupled by gearing, chain etc. so that no speed difference between the drives is
possible.
• speed-controlled when the motor shafts of the master and the follower are flexibly
coupled so that a slight speed difference is possible. When both the master and the
follower are speed-controlled, drooping is also typically used (see parameter 25.8).
The distribution of load between the master and follower can alternatively be adjusted
as described under Load share function with a speed-controlled follower below.
Note: With a speed-controlled follower (without load sharing), pay attention to the
acceleration and deceleration ramp times of the follower. If the ramp times are set longer
than in the master, the follower will follow its own acceleration/deceleration ramp times
rather than those from the master. In general, it is recommended to set identical ramp
times in both the master and the follower(s). Any ramp shape settings (see parameters
23.16…23.19) should only be applied in the master.
In some applications, both speed control and torque control of the follower are required.
In those cases, the operating mode can be switched by parameter (19.12 or 19.14).
Program features 35