Chapter 2 Flight Safety 19
Auto-return Mechanism
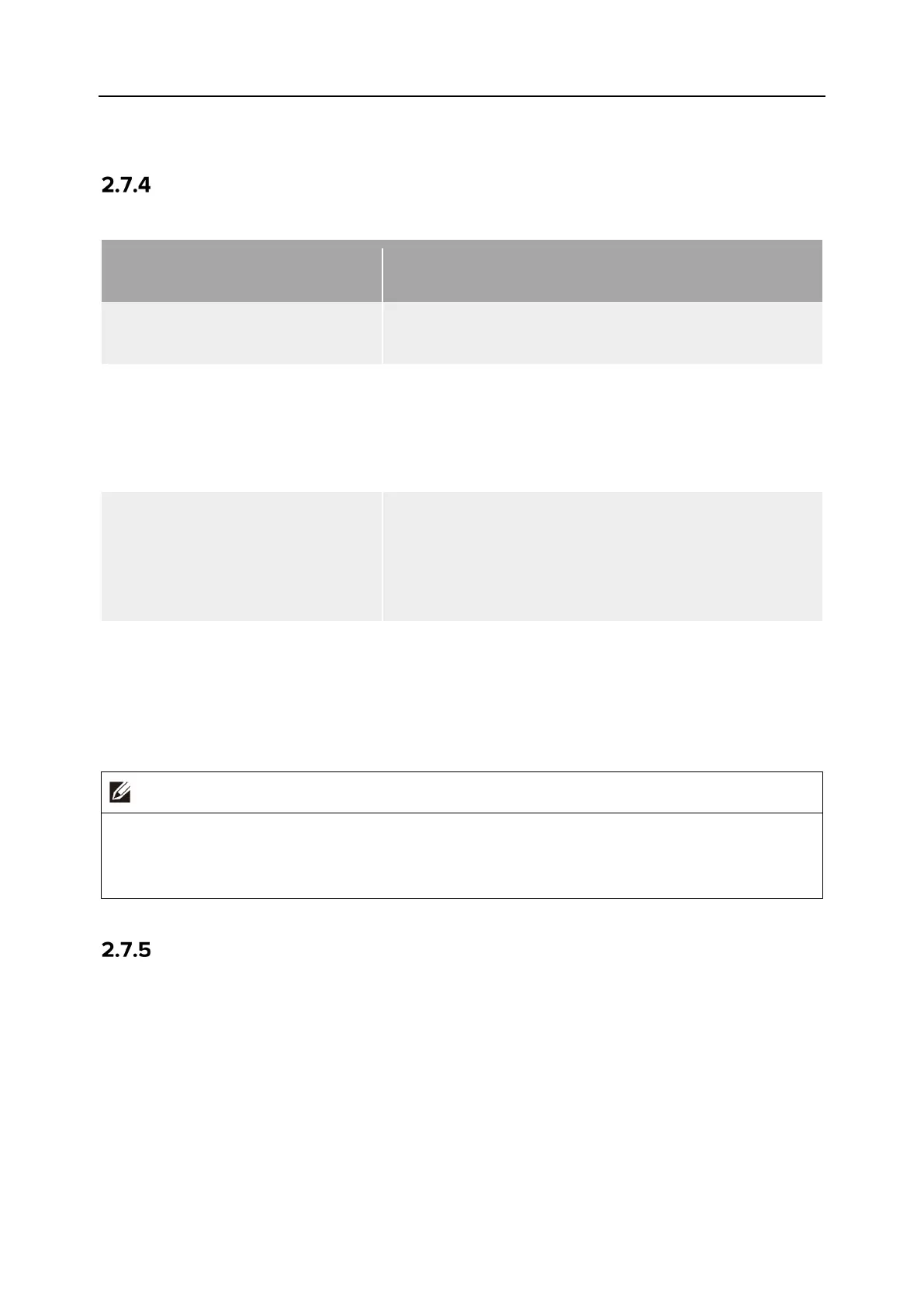
Table 2-1 Auto-return Mechanism
Aircraft distance when the
return mechanism is triggered
Return-to-Home Mechanism
Distance from the home point ≤
10 meters
The aircraft returns to the home point at the current
altitude.
10 meters<Distance from the
home point ≤ 25 meters
If the current flight altitude is lower than 20 meters, the
aircraft ascends to the altitude of 20 meters and returns
to the home point.
If the current flight altitude is higher than 20 meters, the
aircraft returns to the home point at the current altitude.
25 meters < Distance from the
home point ≤ 50 meters
If the current flight altitude is lower than 30 meters, the
aircraft ascends to the altitude of 30 meters and returns
to the home point.
If the current flight altitude is higher than 30 meters, the
aircraft returns to the home point at the current altitude.
Distance from the home point >
50 meters
If the flight altitude is lower than the set RTH altitude, the
aircraft ascends to the RTH altitude.
If the flight altitude is higher than the set RTH altitude,
the aircraft returns to the home point at the current
altitude.
Home point: the point where the aircraft will return and land during an auto-return.
Aircraft distance refers to the horizontal distance from the current aircraft to the home
Auto-return Obstacle Avoidance Process
When the obstacle avoidance system is enabled and the visual sensing system is in appropriate
lighting conditions, the aircraft will achieve obstacle avoidance during the return process. The
specific situations are as follows:
During manual flight, in case of a lost action auto-return, low battery auto-return, or manual
activation of auto-return, when an obstacle is detected in front of the aircraft, the aircraft will
automatically brake within the set brake distance and automatically ascend to avoid the
obstacle until it can safely fly over it.
During flight missions, the obstacle avoidance mode is set to "Bypass". In the case of a lost
action auto-return, low battery auto-return, or mission completion auto-return, when an