Chapter 12 Description of Parameter Settings
MH300
3. Concept of PID control:
Proportional gain (P):
The output is proportional to input. With only proportional gain control, there is always a
steady-state error.
Integral time (I):
The controller output is proportional to the integral of the controller input. To eliminate the
steady-state error, add an “integral part” to the controller. The integral time controls the
relation between the integral part and the error. The integral part increases over time even if
the error is small. It gradually increases the controller output to eliminate the error until it is
zero. This stabilizes the system without a steady-state error by using proportional gain
control and integral time control.
Differential control (D):
The controller output is proportional to the differential of the controller input. During
elimination of the error, oscillation or instability may occur. Use the differential control to
suppress these effects by acting before the error. That is, when the error is near 0, the
differential control should be 0. Use proportional gain (P) and differential control (D) to
improve the system state during PID adjustment.
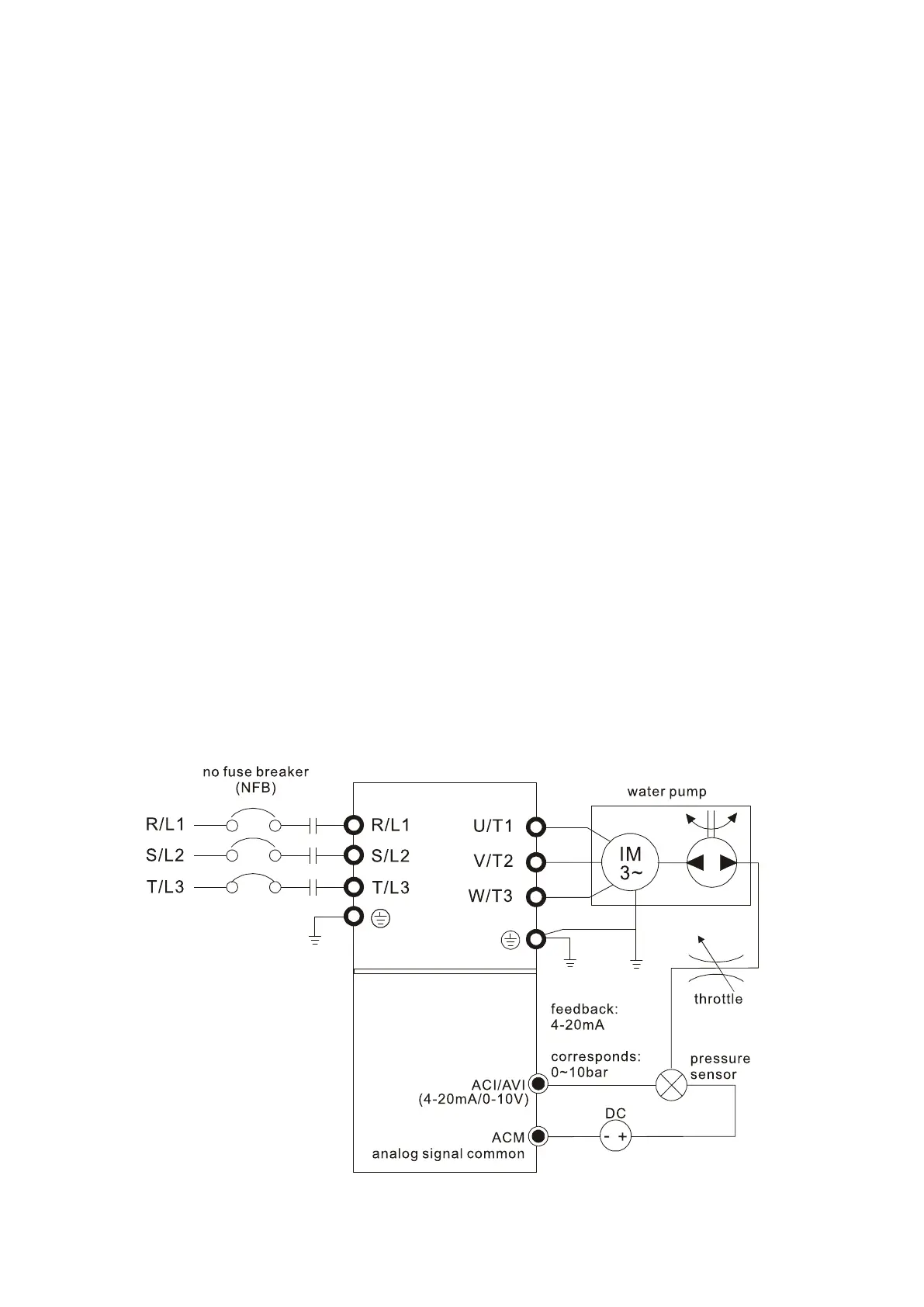
4. Using PID control in a constant pressure pump feedback application:
Set the application’s constant pressure value (bar) to be the set point of PID control. The pressure
sensor sends the actual value as the PID feedback value. After comparing the PID set point and
PID feedback, an error displays. The PID controller calculates the output by using proportional
gain (P), integral time (I) and differential time (D) to control the pump. It controls the drive to use
a different pump speed and achieves constant pressure control by using a 4
–20 mA signal
corresponding to 0
–10 bar as feedback to the drive.

 Loading...
Loading...




