Chapter 16 PLC Function ApplicationsMH300
16-8 Explanation of Each PLC Mode Control (Speed, Torque)
Tor
que mode must be based on FOC vector control, and speed mode can also support FOC
vector control. So for torque mode or FOC-based speed mode, you must complete the motor
parameter auto-tuning in advance; otherwise, the control cannot be completed.
In addition, there are two types of motors: IM and PM. The IM motor only needs to perform
motor parameter auto-tuning, while PM motor must complete auto-tuning of the motor origin offset
angle after the motor parameter auto-tuning is complete. Refer to Pr.05-00 for details.
※ If the PM
motor is one of the Delta ECMA series, you can directly input the motor parameters
according to the servo motor catalog. There is no need to perform motor parameter auto-tuning.
Speed control:
Register table for speed mode:
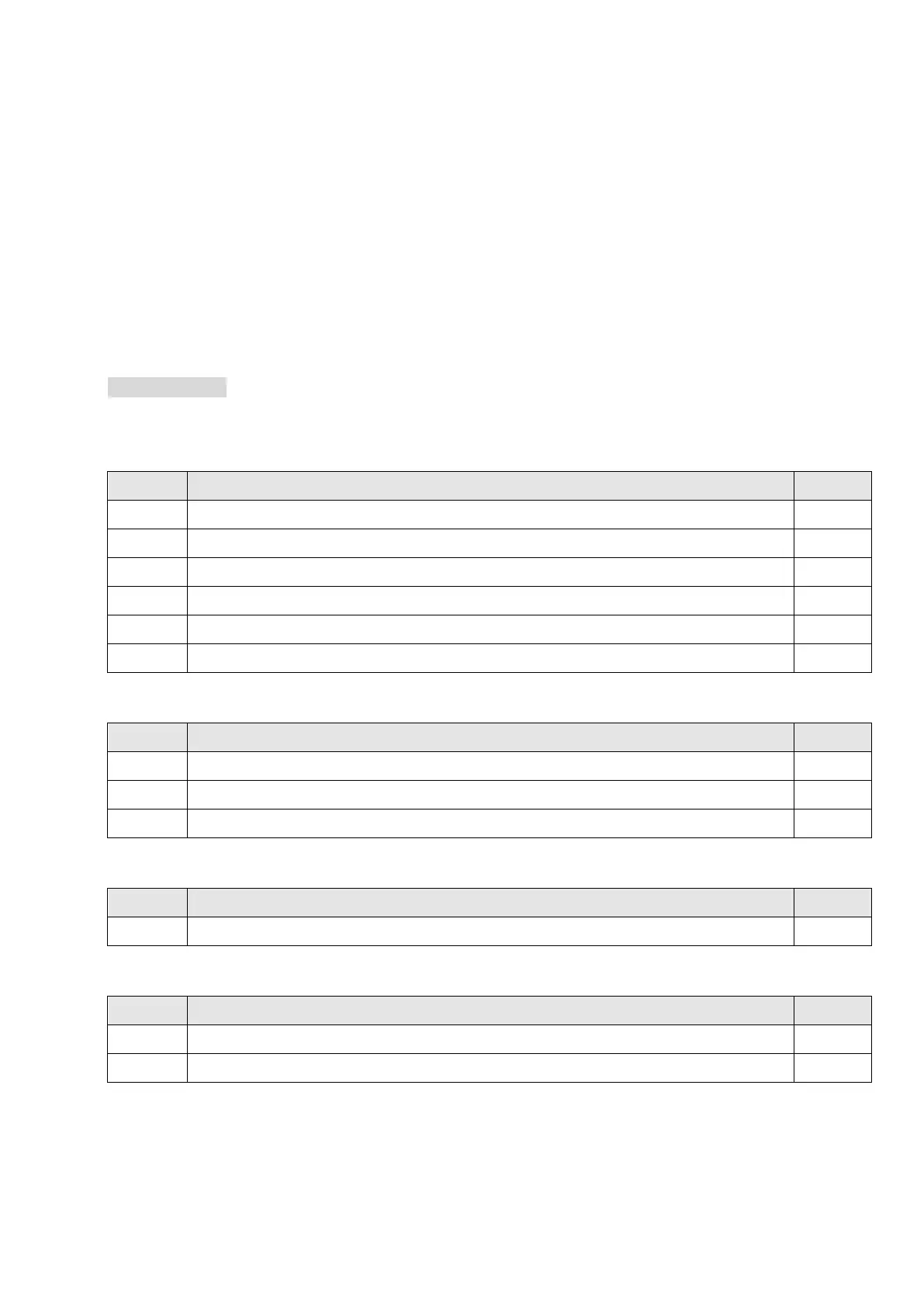
Control special M
Special M
Function Description Attributes
M1025 Drive frequency = set frequency (ON) / drive frequency = 0 (OFF) RW
M1026 Drive operating direction FWD (OFF) / REV (ON) RW
M1040 Hardware power (Servo On) RW
M1042 Quick Stop RW
M1044 Pause (Halt) RW
M1052 Lock frequency (lock, frequency locked at the current operating frequency) RW
Status special M
Special M
Function Description Attributes
M1015 Frequency reached (when used with M1025) RO
M1056 Hardware already has power (Servo On Ready) RO
M1058 On Quick Stopping RO
Control special D
Special D
Function Description Attributes
D1060 Operation mode setting (speed mode is 0) RW
Status special D
Special D
Function Description Attributes
D1037 Drive output frequency (0.00–599.00 Hz) RO
D1050 Actual operation mode (speed mode is 0) RO

 Loading...
Loading...




