Chapter 12 Description of Parameter Settings
MH300
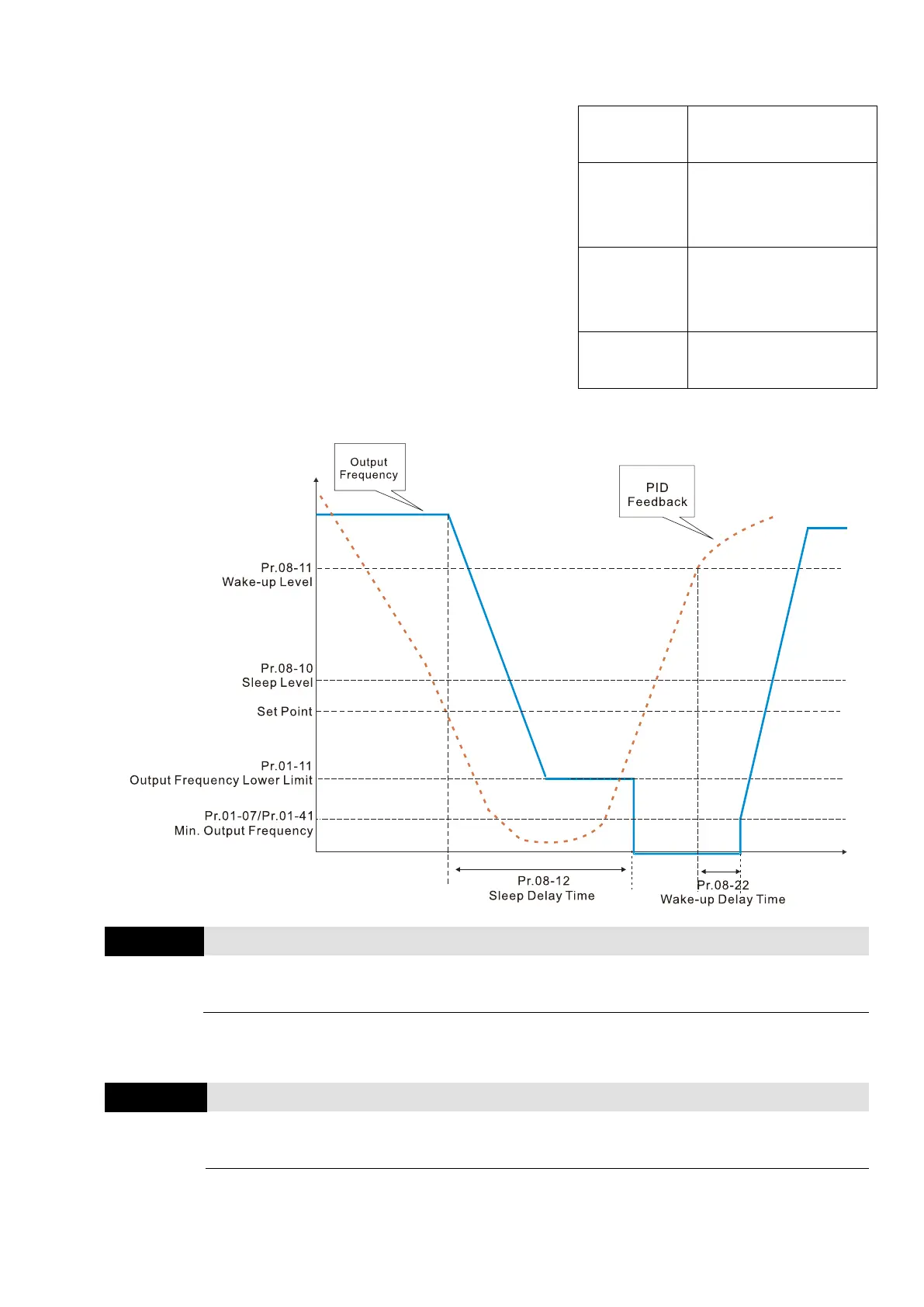
Example 02: PID positive feedback
Pr.08-10 must < Pr.08-11
30kg is the reference
Set the parameter:
Pr.03-00 = 5 (AVI is PID feedback)
Pr.08-00 = 4 (PID
positive feedback: AVI
simulation input function select)
Pr.08-10 = 110% (Sleep reference:
33kg = 110%*30kg)
Pr.08-11 = 120% (Wake-up reference:
36kg = 120%*30kg)
Case 01: If feedback <33kg, frequency decreases.
Case 02: If feedback >36kg, frequency increases.
Area PID
Physical quantity
Sleep area
> 36 kg, the drive
goes into sleep, the
motor goes into sleep
Excessive
area
between 33 kg and 36
kg, the drive remains
in the current state
Wake-up
area
< 33 kg, the drive
wakes-up
PID Output Command Limit (Reverse Limit)
Default: 100.0
Settings 0.0–100.0%
When PID enables the reverse direction, the PID output amount is a negative value, and the
PID output value is limited by the setting for Pr.08-26. Use this function with Pr.08-21.
PID Command Acceleration / Deceleration Time
Default: 0.00
Settings 0.00–655.35 sec.
0.00 seconds: Disables the PID acceleration/deceleration command, and the target value is equal
to the PID command.

 Loading...
Loading...




