Chapter 12 Description of Parameter Settings
MH300
When Pr.08-65 ≠ 0, the internal calculation of Proportional gain will be reduced by 100 times,
that is, when Pr.01-00 Fmax = 60Hz, error = 100%, Pr.08-01 = 1.00, the output frequency is
Pr.01-00 Fmax ‟0.01” times, therefore, the output frequency = 60 × 100% × 0.01 = 0.6Hz.
Calculation formula:
Output frequency = Fmax (Pr.01-00) × error% ((PID reference value (Pr.08-66) - PID feedback
value (Pr.08-00)) × Pr.08-01 × 0.01.
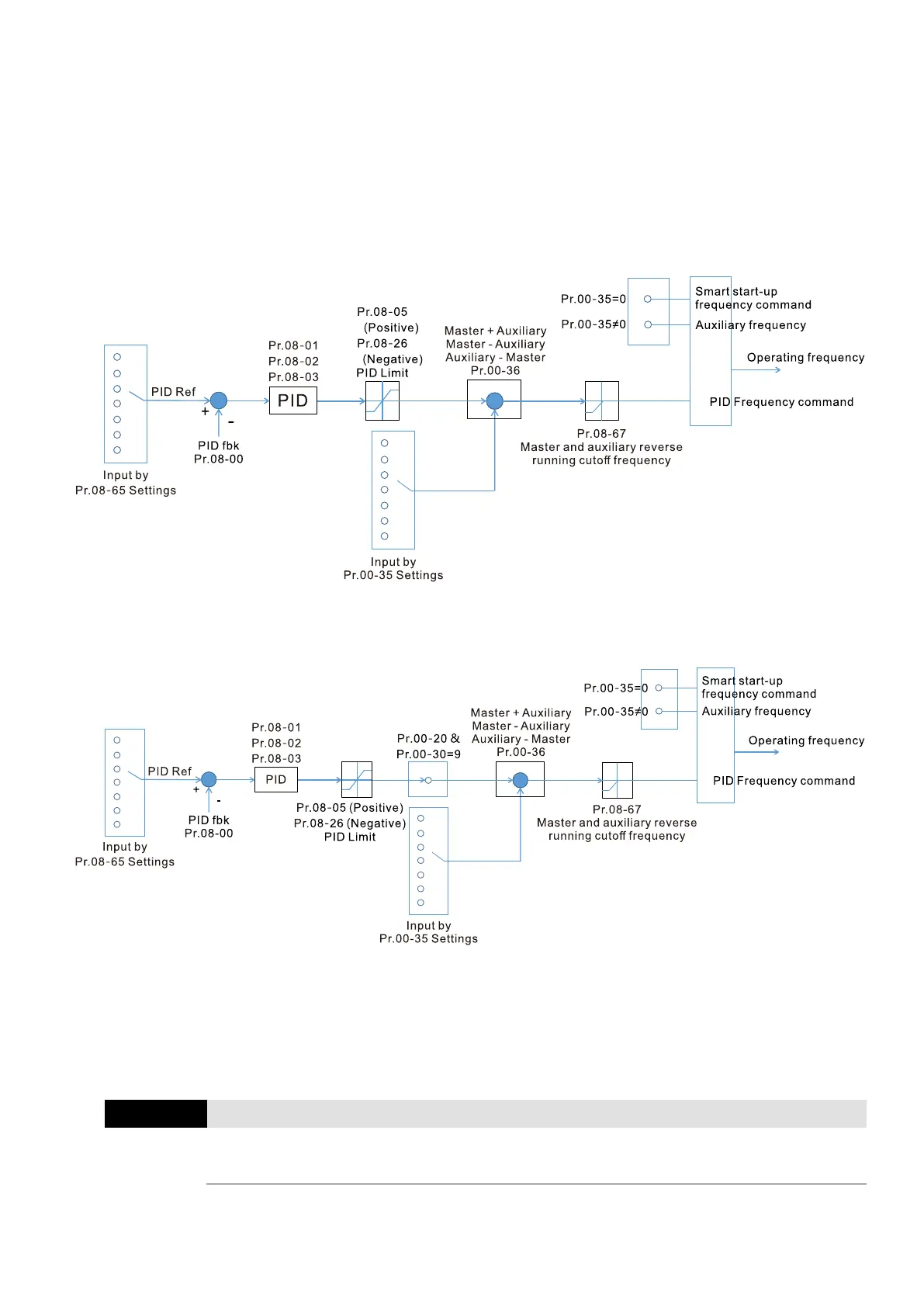
When Pr.08-65=0, the PID controller architecture shows as the diagram below:
When Pr.08-65≠0, the PID controller architecture shows as the diagram below:
When Pr.08-65 is not set to 0, Pr.00-20 is automatically set to 9.
When Pr.08-65 is set to 1, set the PID command through Pr.08-66; when Pr.08-65 is not set to
1, Pr.08-66 displays the PID command.
When Pr.08-65 is set to 2, 4, and 6, the corresponding communication address is C2003H.
Default: 50.00
Settings -100.00–100.00%
The target value setting of PID controller (Pr.08-66) is a relative value

 Loading...
Loading...




