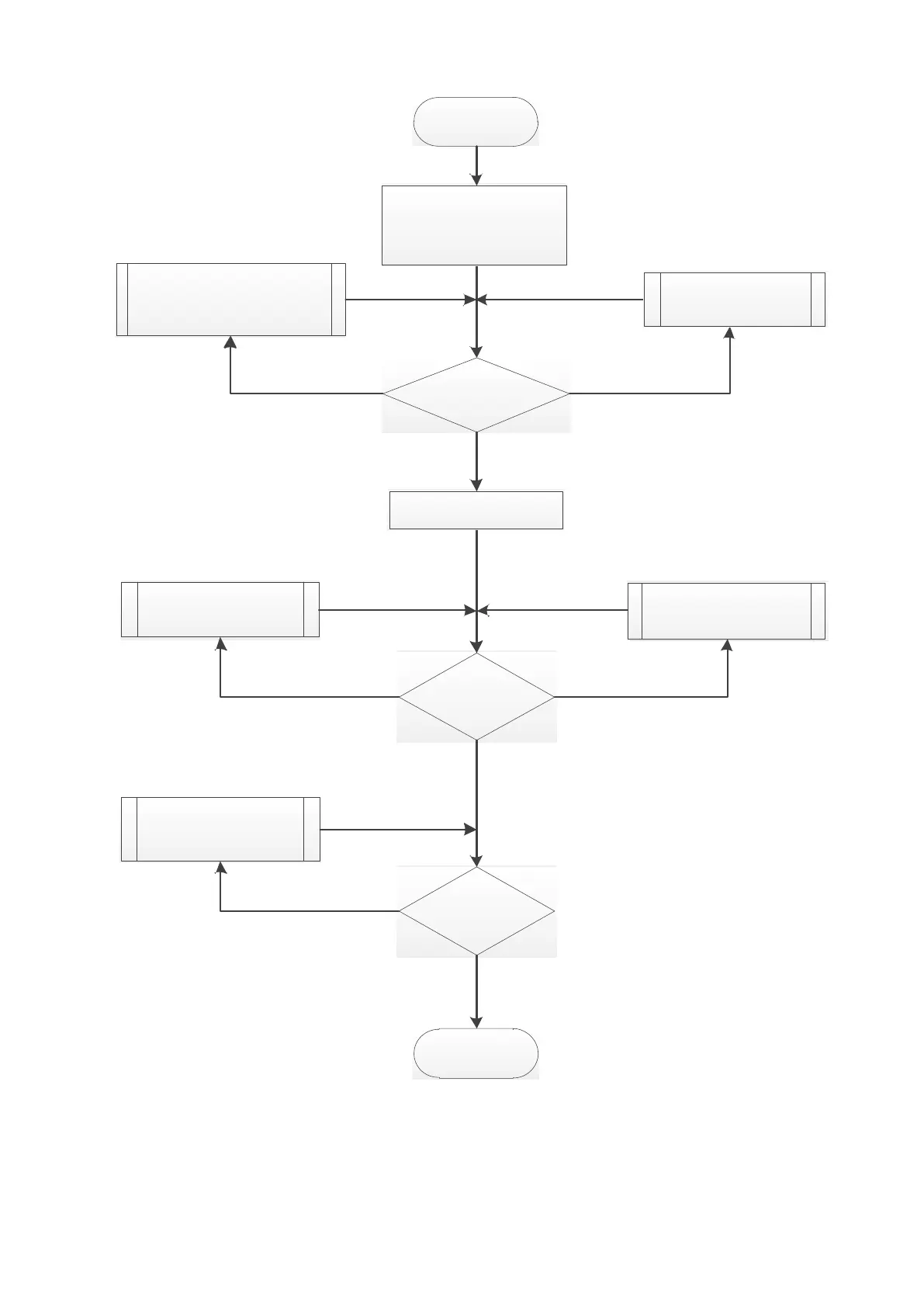
II. IPM Sensorless adjustment flowchart for operation without load / with light load
YES
A1. Rated frequency
runs stable?
Increase ASR2 bandwidth
Pr.11-04
Increase speed estimation
bandwidth Pr.10-32
Cyclicity low-frequency wave
of the motor frequency
Decrease ASR2 bandwidth
Pr
.11-04
Decrease speed estimation
bandwidth Pr.10-32
Strong high-frequency
vibration of output frequency
A2. Reach max.
output frequency?
Increase speed estimation
bandwidth Pr.10-32
Increase low-pass filter gain
Pr.10-34
Vibration or motor stall at max.
rotor speed
NO
NO
10. Running Test
with Load
YES
YES
YES
NO
8. No-load
Running
Started with correct
direction?
Increase Pr.10-52 injection magnitude
Increase Pr.10-42 initial angle detection
pulse value
(Note: too large pulse may cause oc error)
Wrong started direction
causes ocA
When the motor rated frequency
approaches
Increase Pr.10-52
Angle detection of high
frequency injection
9. No-load/Light-load
Acceleration Test
(a) Set speed regulator ASR
Pr.11-00=1 ASR auto-tuning
(b) No-load started to ½ rated
rotor speed

 Loading...
Loading...




