Chapter 16 PLC Function ApplicationsMH300
Basic definitions
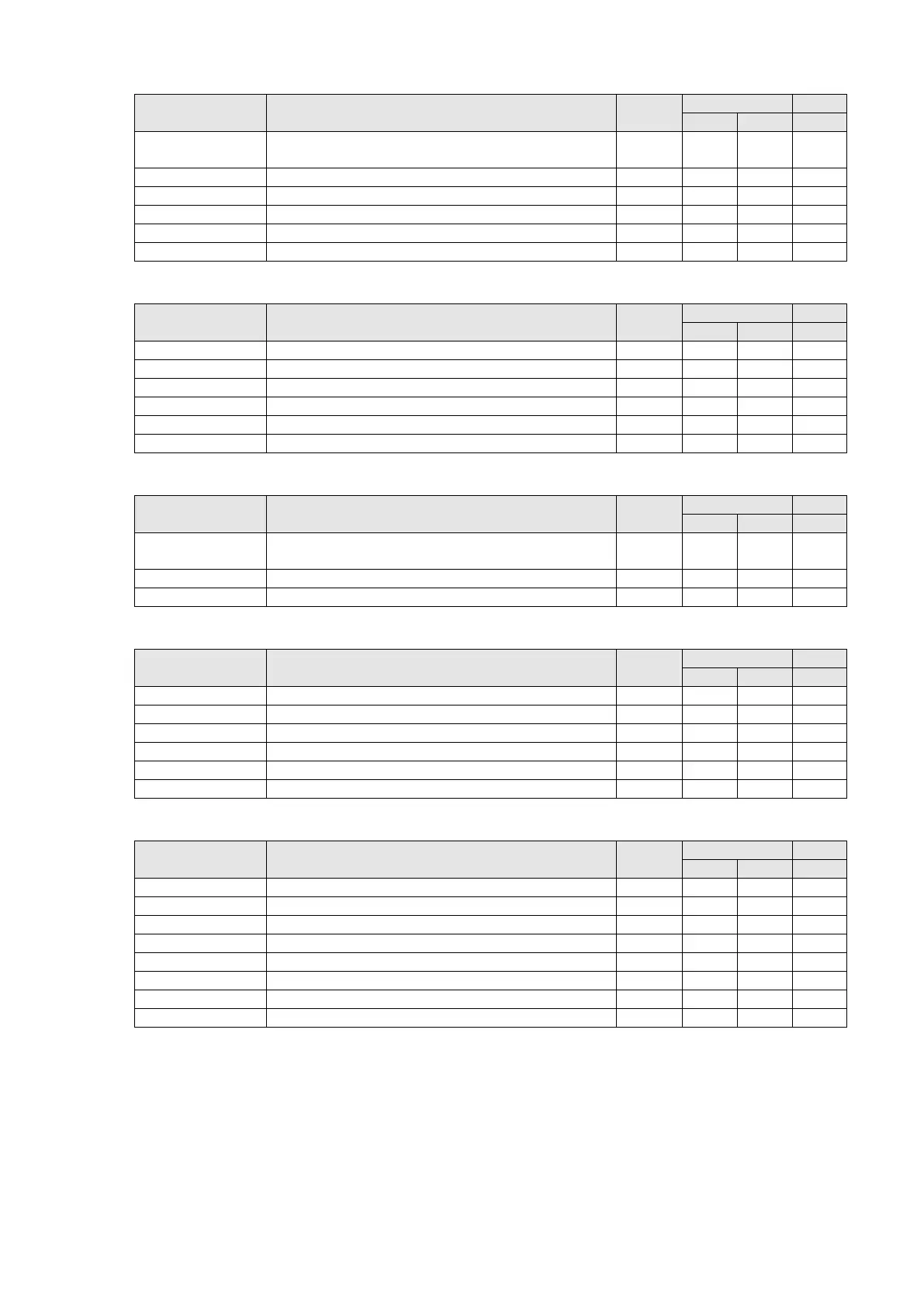
Special D Description of Function Default
D2006+100*n
Communications break handling method of slave
station number n
0 RW
Error code of slave station number n error
Control word of slave station number n
Status word of slave station number n
Control mode of slave station number n
Actual mode of slave station number n
Velocity Control
Special D Description of Function Default
Torque restriction on slave station number n
Target speed of slave station number n (rpm)
Actual speed of slave station number n (rpm)
Error speed of slave station number n (rpm)
Acceleration time of slave station number n (ms)
Deceleration time of slave station number n (ms)
Torque control
Special D Description of Function Default
D2017+100*n
Target torque of slave station number n
(-100.0% – +100.0%)
0 RW
Actual torque of slave station number n(XX.X%)
Actual current of slave station number n(XX.XA)
Position control
Special D Description of Function Default
Target of slave station number n (L)
Target of slave station number n (H)
Actual position of slave station number n (L)
Actual position of slave station number n (H)
Speed chart of slave station number n (L)
Speed chart of slave station number n (H)
Remote I/O
Special D Description of Function Default
MI status of slave station number n
MO setting of slave station number n
AI1 status of slave station number n
AI2 status of slave station number n
AI3 status of slave station number n
AO1 setting of slave station number n
AO2 setting of slave station number n
AO3 setting of slave station number n

 Loading...
Loading...




