Parameter Possible Values Default Rev HHP Lite Std Adv
Accel Out Of A Turn For Grip 0 – 200 % 100 % C -
When a user of a Front Wheel Drive chair requests fast acceleration forward while the
chair is turning, the chair stability will be reduced. On Front Wheel Drive chairs,
acceleration forward causes less weight on the drive wheels because the weight
shifts backwards. Less weight on the drive wheels means that these wheels loose
traction more easily. At the same time, the acceleration request demands the wheels
to apply more forward force to speed up the chair.
The increase of forward force demand combined with less traction reduces the
stability of the chair. To compensate for the reduced stability, the DX System
constantly calculates the traction on each drive wheel and then limits the
momentary value of the forward acceleration dependent on the value of
Accel out of a Turn for Grip.
• A value of 0% does not affect forward acceleration at all
• A value of 200% limits the forward acceleration heavily.
A very heavy acceleration limit may even temporarily limit the forward acceleration
to a negative value, effectively demanding deceleration or slowing down in spite of
the user requesting the forward speed to be increased.
GBK60348
: Issue 1 – October 2007
76
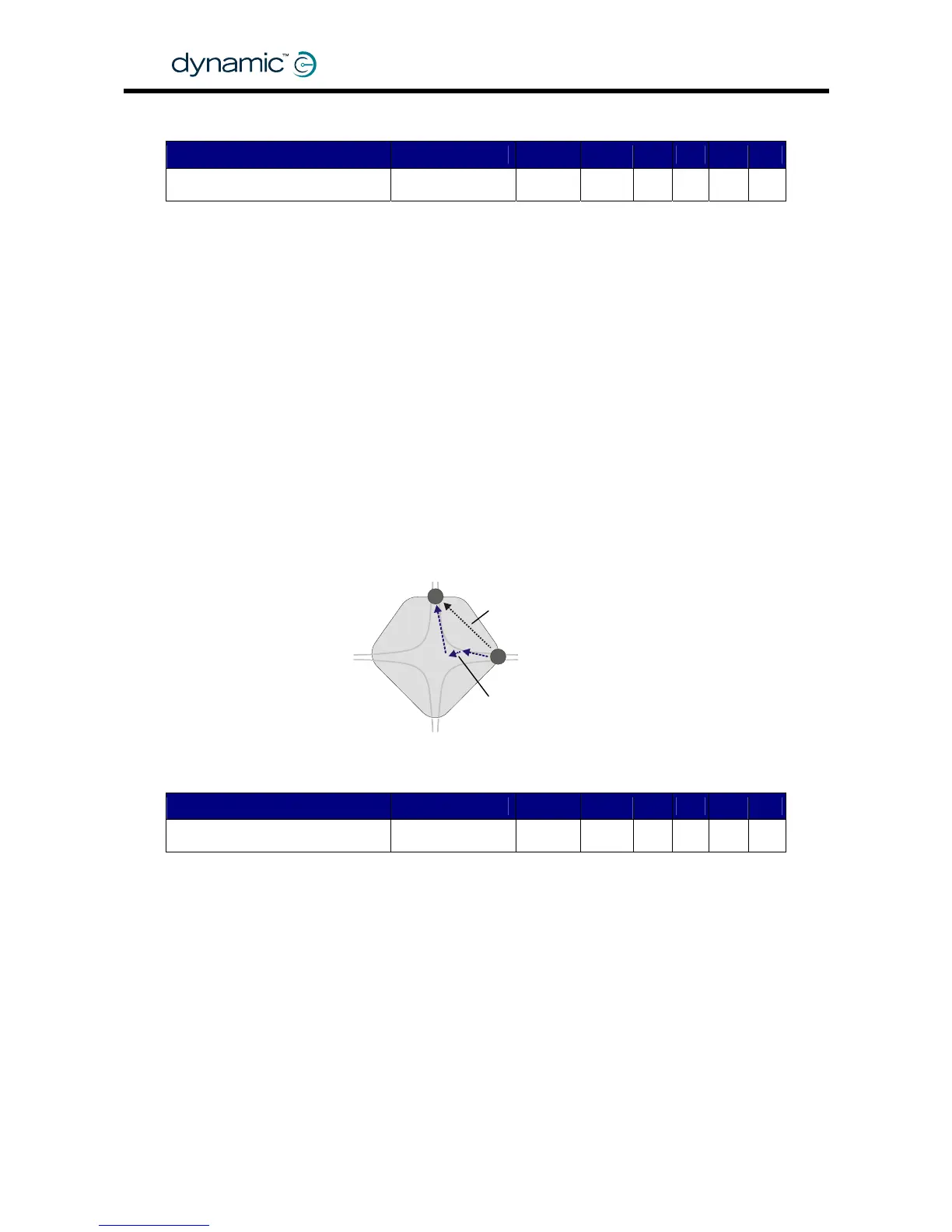
Joystick
movement
Temporary negative forward acceleration:
The outer wheel must slow down to
decrease the turning, before the inner
wheel can accelerate forward.
Parameter Possible Values Default Rev HHP Lite Std Adv
Accel Into A Turn For Grip 0 – 200 % 100 % C -
When the user of a Front Wheel Drive chair requests an increase in turning speed
while the chair is moving forward (for example by requesting a turn when the chair is
travelling straight ahead), the chair stability will be reduced. The turn acceleration will
cause the weight to shift toward the outer drive wheel and away from the inner drive
wheel. The inner drive wheel will therefore loose traction more easily. As the outer
drive wheel speeds up to make the turn, and the inner drive wheel slowly loses
traction, the powerchair can end up spinning.
To prevent the powerchair from spinning, the DX System constantly calculates the
traction on each drive wheel and then limits the momentary value of the turning
acceleration dependent on the value of Accel into a Turn for Grip.
• A value of 0% does not affect the turning acceleration at all
• A value of 200% limits the turning acceleration heavily.