8. Replacing the Timing Belts Part 2: Maintenance
166
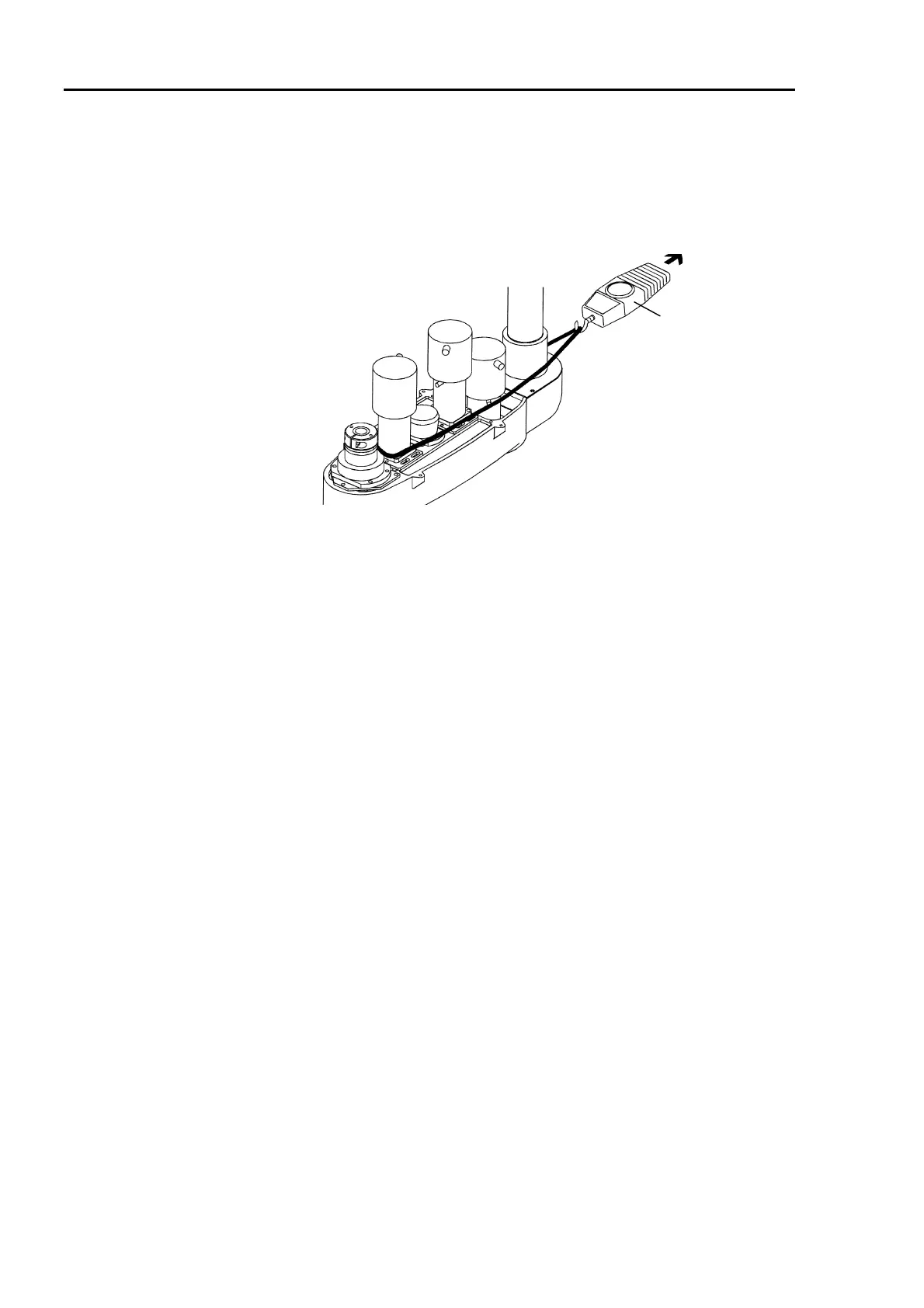
(8) Pass a suitable cord or string around the Joint #3 motor near its mounting plate.
Loosen the bolts for the Joint #3 motor plate fastened in the step (5) and pull the cord
using a force gauge or similar tool. Fasten the Joint #3 motor plate securely where
the Z belt is pulled at 29.4N (3kgf). Adjust in the range of 20N - 39N (2kgf - 4kgf).
Force gauge
(9) Connect the connectors, X131, X31 and X32. Fasten the cables with a wire tie on
their original positions. Do not push them forcibly.
(10) Install the arm top cover and arm bottom cover. (Refer to chapter 2. Opening the
Covers.)
* If the manipulator is a Protected model, seal the arm top cover and arm bottom
cover. Refer to the section Sealing the Manipulator in chapter 13. Protected Model
Maintenance.
(11) The mechanical origin position and teach points change when the timing belts are
replaced. Calibrate Joint #3 and Joint #4 as described in chapter 11. Calibration.
 Loading...
Loading...









